
Autonomous control of automobiles Omar Hashmi, supervised by Uwe Zimmer - PowerPoint PPT Presentation
1 / 29
Title:
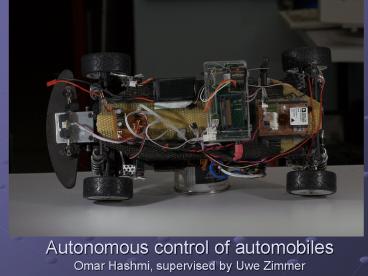
Autonomous control of automobiles Omar Hashmi, supervised by Uwe Zimmer
Description:
Autonomous control of automobiles Omar Hashmi, supervised by Uwe Zimmer The Goal To get a car to drift into a parking spot No Seriously? To get it to drift To ... – PowerPoint PPT presentation
Number of Views:269
Avg rating:3.0/5.0
Title: Autonomous control of automobiles Omar Hashmi, supervised by Uwe Zimmer
1
Autonomous control of automobilesOmar Hashmi,
supervised by Uwe Zimmer
2
The Goal
The goal The drift algorithm The computers The
sensors Implementation Testing
- To get a car to drift into a parking spot
3
No Seriously?
The goal The drift algorithm The computers The
sensors Implementation Testing
- To get it to drift
- To control the parameters of the drift
- To have a repeatable manoeuvrer
- No so concerned about a parking spot
4
But Why?
The goal The drift algorithm The computers The
sensors Implementation Testing
- Drifting is a increasingly popular motor sport
- Allows better safety and control systems
- Allows us to develop better vehicle control
systems - Lets face it its cool.
5
How to drift a Car
The goal The drift algorithm The computers The
sensors Implementation Testing
- Remote control cars much easier to drift- no
gears- light weight- slippery surfaces - Four stage algorithm
6
The drift algorithm
The goal The drift algorithm The computers The
sensors Implementation Testing
1) Accelerate
- The FastCar must be travelling fast enough to
loose traction - Friction with road will slow car quickly once
drifting
7
The drift algorithm
The goal The drift algorithm The computers The
sensors Implementation Testing
2) Steer and brake
- Brake the rear wheels hard so they quickly
decelerate and loose traction with the road - Turn in one direction to change the orientation
of the car
8
The drift algorithm
The goal The drift algorithm The computers The
sensors Implementation Testing
3) Counter-steer
- When the rear of the car is slipping out, reverse
the steering - Front wheels loose traction
9
The drift algorithm
The goal The drift algorithm The computers The
sensors Implementation Testing
4) Control
- All four wheels have lost traction
- Possible to adjust the orientation by
accelerating forwards or backwards.
10
The goal The drift algorithm The computers The
sensors Implementation Testing
What is available?
- Computers
- Sensors
- No brakes (yet)
11
The Computers
The goal The drift algorithm The computers The
sensors Implementation Testing
- ATMEL Atmega128
- Gumstix running Linux
- ATMEL Atmega32 (on IMU)
12
ATMEL
The goal The drift algorithm The computers The
sensors Implementation Testing
- Hardware timers
- PWM outputs
- 128kB flash memory
13
Gumstix
The goal The drift algorithm The computers The
sensors Implementation Testing
- Field Debugging Programming
- Unix redirect (gt), scp, ssh capabilities
- Makes programming and debugging much easier!
14
The goal The drift algorithm The computers The
sensors Implementation Testing
15
The Sensors
The goal The drift algorithm The computers The
sensors Implementation Testing
- Gyroscopes
- Accelerometers
- Proximity Detectors
16
IMU
The goal The drift algorithm The computers The
sensors Implementation Testing
- Accelerometers tell us x y z linear acceleration
- Gyroscopes tell us x y z rotational acceleration
- Rotation around z axis turning the steering
wheel
17
(No Transcript)
18
IR distance sensor
The goal The drift algorithm The computers The
sensors Implementation Testing
- Can detect objects up to 1 meter away (at best)
- Accounting for noise 60cm
- Not enough time to use past a crawling speed
19
Available information
The goal The drift algorithm The computers The
sensors Implementation Testing
- How fast we are accelerating
- Turning ability
- Can use z axis gyroscope to detect slipping out
of rear wheels.
20
4 steps 4 states
The goal The drift algorithm The computers The
sensors Implementation Testing
- Accelerate
- Steer Brake
- Counter Steer
- Hold Control
21
The goal The drift algorithm The computers The
sensors Implementation Testing
- Accelerate for 0.75s
- Builds up required speed
- Incremental acceleration
22
The goal The drift algorithm The computers The
sensors Implementation Testing
- Reverse motor to brake rear wheels
- Turn hard left
- Transition when high angular acceleration is
detected
23
The goal The drift algorithm The computers The
sensors Implementation Testing
- Idle motor (dont want to reverse)
- Turn hard right
- All four wheels should be drifting
- Transition after 0.25s
24
The goal The drift algorithm The computers The
sensors Implementation Testing
- Motor controlled by RC
- Turn hard right
- Terminate after 2s
25
Testing
The goal The drift algorithm The computers The
sensors Implementation Testing
- Drifting
- Repeatability
- Parameters
26
Test Track
The goal The drift algorithm The computers The
sensors Implementation Testing
27
Test run
The goal The drift algorithm The computers The
sensors Implementation Testing
- Show .mp4
- Drifting
- Rotation during the drift, not just before
28
Results
The goal The drift algorithm The computers The
sensors Implementation Testing
- Mean drift of 46
- Drifts on all tested surfaces (track, carpet,
tiles) - Repeatable maneuver
- Not the desired angle
29
So long, and thanks for all the fish