
Control System Analysis Cycle - PowerPoint PPT Presentation
1 / 29
Title:
Control System Analysis Cycle
Description:
? (zeta)=damping ratio. ?n=natural frequency. Transfer ... ? (zeta)=damping ratio , ?n=natural frequency ... Step Responses with different damping ratio (zeta) ... – PowerPoint PPT presentation
Number of Views:70
Avg rating:3.0/5.0
Title: Control System Analysis Cycle
1
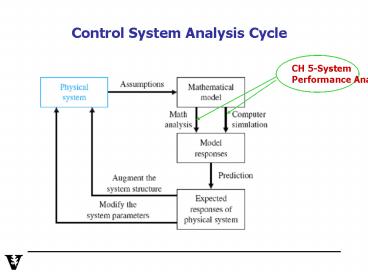
Control System Analysis Cycle
CH 5-System Performance Analysis
2
CH. 5 Performance of Feedback Control Systems
- This chapter describes how the input and the
poles and zeros of the system will affect system
performance, i.e. system output (or response).
3
CH. 5 Performance of Feedback Control Systems
- This chapter describes how the input and the
poles and zeros of the system will affect system
performance, i.e. system output or response. - Topics to be covered
- - Input Signals for testing performance (5.2)
- - Performance of 1st-order Systems
- - Performance of 2nd-order Systems (5.3)
- - Root Location and the Transient Response
(5.5) - - Steady-State Error of Feedback Systems (5.6)
- - Design Example (5.9)
- - Performance Analysis using Matlab and
Simulink - (5.10,5.11)
4
System Performance
- System Responses
- 1. Time (or Transient) Response lt
- 2. Frequency (or Steady-State) Response (Ch.
8) - Key Concepts
- 1. System Characteristic Equation
- 2. Poles and Zeros
5
Impulse Response A Special Case of Time Response
- The impulse response is the response for control
systems to an input d(t) where - d(t) 1 (Table 2.3, p. 51).
- So, if the input is the impulse, the output
- is the inverse Laplace transform of the
transfer function G(S) - R(s)1 Y(s)G(S)
- or
y(t)g(t)
G(s)
6
Matlab Command for Impulse Response impulse(sys)
- So, if the input is the impulse, the output is
the inverse - Laplace transform of the transfer function
G(S) - R(s)1
Y(s)G(S) - Matlab command for the unit impulse response of
LTI systems is - gtgtimpulse(sys) Plots the impulse response of
an arbitrary LTI model sys. This model can be
SISO or MIMO, i.e. state models. Zero initial
state is assumed for state models.
G(s)
7
Example
- So, if the input is the impulse, the output is
the inverse - Laplace transform of the transfer function
G(S) - R(s)1
Y(s)G(S) - Ex. G(s)1/(sst) gt g(t)e-st, tgt0.
G(s)
8
Time (Transient) Response
- Let the system transfer function be
- G(s)p(s)/q(s). Eq.(2.45), p. 58
- Then,
- 1. The (System) Characteristic Eqn. is q(s)0.
- 2. Poles are the roots of q(s)o.
- 3. Zeros are the roots of p(s)0.
9
Example
- Consider the transfer function
- G(s)p(s)/q(s)(2s1)/(s23s2)
- gt
- Poles q(s) s23s20 gt s-1,-2
- Zeros p(s)2s10 gt s-1/2
10
Poles and System Stability
- Location of Poles will determine the system
stability (Ch. 6)
11
Finding system poles and zeros
- Example pole and zero (Ch. 2, p. 107)
12
Commonly Used Input Signals(Table 5.1, Fig. 5.2,
p. 279)
- (a) Step (b) Ramp
(c) Parabolic
r(t)A, tgt0
r(t)At, tgt0
r(t)At2, tgt0
13
Performance of First-Order Systems
- Ex. Transfer function of the RC circuit below
- (p. 53, Ch. 2)
- V1(s)(R1/Cs)I(s) and
- V2(s)I(s)(1/Cs)
- ? G(s)V2(s)/V1(s)1/(RCs1)
- where RC is called the time constant ?.
14
Transfer Function of First-Order Systems
- Ex. G(s)V2(s)/V1(s)1/(RCs1) where RC is called
- the time constant ?.
- ?In general,
- G(s) K/(?s1), where Ksystem DC gain
- (i.e.,
KG(0)). - R(s)
Y(s)
G(s)
15
Performance of First-Order Systems
- G(s) K/(?s1), where Ksystem DC gain (G(0)),
- and ? time
constant - Step response R(s)1/s Y(s)
- gt
- Y(s)K/s K/(s1/?)
- gt
- y(t) K(1-e t/? )
G(s)
?
16
Performance of First-Order Systems
- G(s) K/(? s1), where Ksystem DC gain (i.e.,
KG(0)). - 1. Step response U(s)1/s gt
- Y(s)K/s K/(s1/? gt y(t)
K(1-e -t/? ) - 2. Ramp response R(s)1/s2 gt
- Y(s) K/s2 K? /s K? /(s1/?)
- gt
- y(t) Kt - K? K? e t/?
ess Steady-state error
17
Transfer Function of a Second-Order Linear System
- Ex. A spring-mass-damper system
- From Ch. 2, Md2y/dt2bdy/dtkyu(t)
- gt
- G(s) 1/(Ms2 bs k)
18
Transfer Function of a 2nd-Order System
- Standard Form
- Y(s)G(s)/(1G(s))U(s)
- ?n2/(s22? ?ns ?n2)R(s) (5.7)
- where,
- ? (zeta)damping ratio
- ?nnatural frequency
19
Transfer Function of a 2nd-Order System
- Standard Form
- Y(s)G(s)/(1G(s))U(s)?n2/(s22? ?ns
?n2)R(s) (5.7) - where,
- ? (zeta)damping ratio , ?nnatural
frequency - Notes Damping ratio is a real number between 0
and 1, and defines the damping properties of the
system, i.e. - the smaller ? is, the bigger system
oscillation becomes. - Natural frequency or natural mode of a system
determines system frequency response with no
forcing function, i.e. u(t)0.
20
Fig. 5.5 Step Response of y(t) 1 (1/ß)e - ?
?nt sin(?n ß t ?)
? 0.1 0.2 0.7 1.0 2.0
21
Performance of a 2nd-Order System
- Unit Step Responce
- Y(s)G(s)R(s), R(s)1/s
- ?n2/s(s22? ?ns ?n2) (5.8)
- gt
- y(t) 1 (1/ß)e - ? ?nt sin(?n ß t ?)
(5.9) - where
- ß ?2
22
Ex. Effect of ?n on the step response (Figure
5.10)
23
Step Response of a 2nd-Order System
- Standard form G(s) ?n2/s(s2? ?ns ?n2)
- For complex poles, the unit step response
is - y(t) 1 (1/ß)e - ? ?nt sin(?n ß t
?) - Key Response Parameters (used in Design)
- -Tr (Rise time)
- -Tp (Peak time)
- -Mpt(Peak Value)
- -P.O.( Overshoot)
- ((Mpt-fv)/fv)x100
- where fvthe steady-state,
- or final, value of y(t)
24
Response Parameters of a 2nd-Order System
- Key Response Parameters
- -Tr (Rise time) The time it takes for the
system to reach the vicinity of its target value
fv. - -Ts (Settling Time) The time it takes to
settle within a certain percentage of the input. - -Tp (Peak time) The time to take to reach the
maximum overshoot point. - -Mpt(Peak Value) The output value at tTp
- -Mp(Overshoot) (Mpt-fv)/fv)
- The maximum amount the system
- overshoots its final value divided
- by its final value ( and often
- expressed as a percentage).
25
Step Response
- 2nd-Order System Response (Figure 5.7, p. 284)
Overshoot
Peak Time
Input
Settling Time
Rise Time
26
Response Parameters of a 2nd-Order System
- Key Response Parameters
- -Tr (Rise time) The time it takes for the
system to reach the vicinity of its target value
fv. - -Ts (Settling Time) The time it takes to
settle within a certain percentage of the input. - -Tp (Peak time) The time to take to reach the
maximum overshoot point. - -Mpt(Peak Value) The output value at tTp
- -Mp(Overshoot) (Mpt-fv)/fv)
- The maximum amount the system
- overshoots its final value divided
- by its final value ( and often
- expressed as a percentage).
27
Response Parameters of a 2nd-Order System
- Key Response Parameters
- -Tr (Rise time) The time it takes for the
system to reach the vicinity of its target value
fv. - -Ts (Settling Time) The time it takes to
settle within a certain percentage of the input.
Normally Ts4/??n (5.13) - -Tp (Peak time) The time to take to reach the
maximum overshoot point. - -Mpt(Peak Value) The output value at tTp
- -Mp(Overshoot) (Mpt-fv)/fv)
- The maximum amount the system
- overshoots its final value divided
- by its final value ( and often
- expressed as a percentage).
28
Overshoot and Damping Ratio
- Key Response Parameters (used in Design)
- Tp (Peak time)
- pi/(?n ?2) (5.14)
- gt
- Percent Overshoot
- 100exp(-?pi/ ?2 ) f(?)
- (5.16)
- and
- ?n Tp pi( ?2)
- gt
- Figure 5.8, p. 285
29
Step Responses with different damping ratio (zeta)
- This script will plot step responses for the
system - transfer function G(s)1/(s2 2zetas 1) for
- zeta0.2, 0.4,1 and 2
- zet0.2 0.4 1 2
- for k14
- zetazet(k)
- Gtf(1,1 2zeta 1)
- step(G)
- hold on
- end
Recommended
CrystalGraphics Presentations





























