
Robert Johnston, Patrick Steely, Kyle Mcneil, Derek Niro,
1 / 1
Title:
Robert Johnston, Patrick Steely, Kyle Mcneil, Derek Niro,
Description:
Robert Johnston, Patrick Steely, Kyle Mcneil, Derek Niro, ... in otherwise inaccessible terrain i.e. jagged rock formations and small craters. ... –
Number of Views:85
Avg rating:3.0/5.0
Title: Robert Johnston, Patrick Steely, Kyle Mcneil, Derek Niro,
1
NETWORK SURVEILLANCE ROBOT
Robert Johnston, Patrick Steely, Kyle Mcneil,
Derek Niro, Renee Straney, Juan FM Rivera,
Daniel Hemmingson
rsj032000_at_utdallas.edu, psteely22_at_hotmail.com,
ksm044000_at_utdallas.edu, dsn021000_at_utdallas.edu,
rls013400_at_utdallas.edu, JuanFMRivera_at_gmail.com,
danhemmingson_at_gmail.com
Department of Electrical Engineering Erik Jonsson
School of Engineering Computer
Science University of Texas at Dallas Richardson,
Texas 75083-0688, U.S.A.
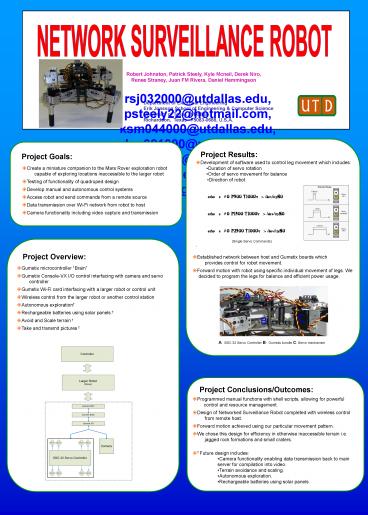
Project Results
Project Goals
- Development of software used to control leg
movement which includes - Duration of servo rotation
- Order of servo movement for balance
- Direction of robot
- Create a miniature companion to the Mars Rover
exploration robot capable of exploring
locations inaccessible to the larger robot - Testing of functionality of quadruped design
- Develop manual and autonomous control systems
- Access robot and send commands from a remote
source - Data transmission over Wi-Fi network from robot
to host - Camera functionality including video capture and
transmission
echo e 0 P500 T1000\r gt /dev/ttyS0 echo e
0 P1500 T1000\r gt /dev/ttyS0 echo e 0
P2500 T1000\r gt /dev/ttyS0 (Single Servo
Commands)
Project Overview
- Established network between host and Gumstix
boards which provides control for robot
movement. - Forward motion with robot using specific
individual movement of legs. We decided to
program the legs for balance and efficient power
usage.
- Gumstix microcontroller Brain
- Gumstiix Console-VX I/O control interfacing with
camera and servo controller - Gumstix Wi-Fi card interfacing with a larger
robot or control unit - Wireless control from the larger robot or another
control station - Autonomous exploration
- Rechargeable batteries using solar panels
- Avoid and Scale terrain
- Take and transmit pictures
A SSC-32 Servo Controller B Gumstix bundle C
Servo mechanism
Project Conclusions/Outcomes
- Programmed manual functions with shell scripts,
allowing for powerful control and
resource management. - Design of Networked Surveillance Robot completed
with wireless control from remote host. - Forward motion achieved using our particular
movement pattern. - We chose this design for efficiency in otherwise
inaccessible terrain i.e. jagged rock
formations and small craters. - Future design includes
- Camera functionality enabling data transmission
back to main server for compilation into video. - Terrain avoidance and scaling.
- Autonomous exploration.
- Rechargeable batteries using solar panels.
Recommended
CrystalGraphics Presentations





























