
Shape Deposition Manufacture of Mesoscale Robotic Devices PowerPoint PPT Presentation
1 / 26
Title: Shape Deposition Manufacture of Mesoscale Robotic Devices
1
Shape Deposition Manufacture of Mesoscale Robotic
Devices
- Sean Bailey
- Stanford University
- Pontedera, Italy
- June 11, 2002
2
Roadmap
- Who am I?
- Initial biomimetic robotics work
- Recent animal work
- What I want to doin Pontedera
- Summary
Intro
3
Thanks
- Professor Dario and everyone else here
- Pietro and Lisa
- Mark Cutkosky
Intro
4
Who am I?
Intro
5
Common Themes
- Robotics
- Intelligence
- Animal/artificial
- Structures
- What I am not
- Manufacturing expert
- Controls/AI expert
- Biologist/Neuroscientist
Intro
6
Common ground with other projects
- Next generation of neuroscience and clinical
tools - MiTech (aka CRIM)
- Cesares grippers (soft materials, sensors)
- Intestinobot, spinal cord probe
- ARTS
- Neuro-prosthetics (neural interface)
- Sensorized hands
- Percro
- Robotic-human interaction with embedded sensing
Intro
7
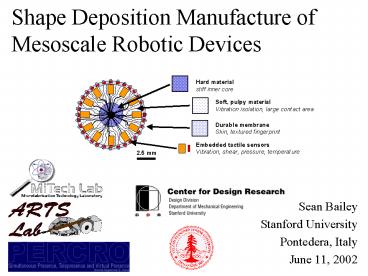
Shape Deposition Manufacturing
- Layered manufacturing technology
- Deposit and shape materials
- Better surface finish
- Arbitrary geometries
- Embedded components
- Low requirements for deposition
- Polymers, metals
- Well-suited for mesoscale
- Gap between machining and lithography
- 3D assemblies with features on 1-100 m scale
Early work
8
Biomimetic Inspiration
- Bob Full (UC Berkeley)
- Passive mechanical properties dominate
- Compliance
- Damping
- Sprawled posture
- Feedforward motor signals open loop control
Early work
9
The Sprawl Family
- Biomimetic mapping
- Kinematics
- Compliance
- Built a series of robots
- Sprawl (video)
- Mini-Sprawl (video)
- Sprawlita (video)
Early work
10
Sprawlita
Early work
11
Biomimetic Locomotion?
- Locomotion dynamics
- Energy profiles, ground reaction forces
- Differences, but what does it mean?
- What is the animal trying to regulate while it
is running? - What, how fast, and in what way
- Sensor and adaptation schemes for robotics
Early work
12
Animal Experiments
- Paradigm
- Environment-modifying computer in the loop during
natural behaviors - Running naturally, perturb, look for changes (in
actively controlled parameters) - Why cockroach?
- Excellent runner
- Relatively simple nervous system easy to
interpret EMG
Watson and Ritzmann, 1998
Cockroach EMG
Recent work
13
Animal Experiments
Kugle setup
Force-displacement actuator
Universal joint (aka candle)
EMG electrodes (50mm silver wire)
Cockroach (Blaberus discoidalis)
Kugle (hollow foam on air bearing)
14
Animal Experiments
- Videos
Recent work
15
Animal Experiments
EMG recording electrodes in extensor tibia
- Videos
Recent work
16
Preliminary Results
- Animal data is hard to interpret
- Running is inherently irregular what is
steady-state?
EMG
VerticalDisplacement
One Stride
Recent work
17
Preliminary Results
- Changes are apparent
- Quantify? Validate?
Stride Period
Before
Perturbation
After
Recent work
18
Biomimetic Structures
- Amazing actuators
- Passive mechanical properties
- Heavily sensorized
Recent work
19
Biomimetic Structures
- In fact, begs the question of why not just use
the animal instead of trying to rebuild it - Makes sense in some cases, but
- Animals have more constant needs
- Engineered devices are more convenient, flexible
in other ways precision, non-biological tasks,
etc
Recent work
20
What I want to do while Im here
- Make SDM more 3D currently 2 ½ D
- Shape soft materials
- 3D wiring
- Inter-layer embedded components
- Anything else interesting
- Cool machines focused ion beam
- Neuroscience medical device projects
In Italia
21
Shape Soft Materials
- Right now,
- Shape clear stuff (70D shore)
- Plane white stuff (90A shore)
- Squeegy blue stuff (10A shore)
- Shaping attempts
- Failure during machine
- Poor surface finish
- Cooling shrinks part, and releases
- Ideas
- High speed (material damping)
- Localized freezing (liquid nitrogen jets) and
global warming
In Italia
22
3D Wiring sheets vs. bundles
- Flexible circuits (sheets, 2 ½ D)
- Limited aspect ratio
- Constant aspect ratio
- Stiff traces
- 3D placement of sensors
- Vias!
- Want more flexibility (bundles, 3D)
- Flexures
- Aspect ratio changes
- Higher density
- Compliant traces
exit point at top of fingertip
In Italia
23
3D Wiring sheets vs. bundles
- Component connections
- Die-packaged ICs
- Ideas
- Electroplating (Localized? Electroless?
Sputtering?) - Conductive inks/polymers (in situ SDM circuits)
In Italia
24
Inter-layer Embedded Components
- Cross layer boundaries
- Actuators, sensors
- Wiring
- Fibers (for strength)
- Need protection from
- Encapsulation
- Shaping
- Current methods are hacks
- Thin channels, dams, spacers, hiding, protective
sacrificial material (wax) - Ideas
- Selectively removable materials (from
lithography) - Selectively permeable materials (sponges)
In Italia
25
Summary
- Interests
- Previous work
- Activities here
- Interest in finding out more about other
projects
Summary
26
(No Transcript)
Recommended
