
Diseo de controladores digitales PowerPoint PPT Presentation
1 / 44
Title: Diseo de controladores digitales
1
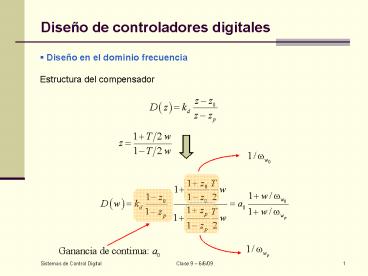
Diseño de controladores digitales
- Diseño en el dominio frecuencia
- Estructura del compensador
2
Diseño de controladores digitales
- Diseño en el dominio frecuencia
- Procedimiento de diseño
Transformación
Diseño en w
3
Diseño de controladores digitales
- Diseño en el dominio frecuencia
- Obtención del controlador discreto
4
Diseño de controladores digitales
- Diseño en el dominio frecuencia
- Compensador de retraso de fase (LAG)
Efecto deseadoIncremento de ganancia en baja
frecuencia (o atenuación en alta) Efecto
indeseadoRetraso de fase
Ubicar el compensador donde el retraso de fase no
perjudique el margen de fase
5
Diseño de controladores digitales
- Diseño en el dominio frecuencia
- Compensador de retraso de fase (LAG) - Efecto
6
Diseño de controladores digitales
- Diseño en el dominio frecuencia
- Guía para el diseño del compensador de retraso de
fase (LAG) - Seleccionar la ganancia (a0) del compensador para
satisfacer requerimiento de error estacionario o
MF. - Determinar la frecuencia de cruce deseada
(inferior a la de lazo abierto). - Ubicar el cero del compensador 10 veces por
debajo de la frecuencia de cruce. - Calcular el polo del compensador para tener
ganancia unitaria a la frecuencia de cruce.
7
Diseño de controladores digitales
- Diseño en el dominio frecuencia
- Compensador de adelanto de fase (LEAD)
Efecto deseadoAporte de fase. Efecto
indeseadoIncremento de la ganancia de alta
frecuencia.
8
Diseño de controladores digitales
- Diseño en el dominio frecuencia
- Compensador de adelanto de fase (LEAD)
El aporte de fase máximo está dado por la
distancia relativa entre el cero y el polo del
compensador
9
Diseño de controladores digitales
- Diseño en el dominio frecuencia
- Compensador de adelanto de fase (LEAD) - Efecto
10
Diseño de controladores digitales
- Diseño en el dominio frecuencia
- Guía para el diseño del compensador de adelanto
de fase (LEAD) - Seleccionar la ganancia (a0) del compensador para
satisfacer requerim. de error estacionario o
frecuencia de cruce (ancho de banda). - Evaluar el margen de fase del sistema no
compensado MF. - Determinar el aporte de fase necesario
- Determinar la separación polo-cero.
- Determinar la nueva frecuencia de cruce donde
- Evaluar el MF del sistema compensado. De ser
necesario, iterar o agregar etapas
11
Diseño de controladores digitales
- Diseño en el dominio frecuencia
Ejemplo diseño LAG
- Especificaciones
- Mantener el error estacionario
- No aumentar el ancho de banda
- Mejorar el transitorio (MF55º)
12
Diseño de controladores digitales
- Diseño en el dominio frecuencia
Ejemplo diseño LAG (cont.) Evaluamos la respuesta
en frecuencia de
13
Diseño de controladores digitales
- Diseño en el dominio frecuencia
Ejemplo diseño LAG (cont.) Evaluamos la respuesta
en frecuencia de
60º
14
Diseño de controladores digitales
- Diseño en el dominio frecuencia
Ejemplo diseño LAG (cont.) Evaluamos la respuesta
en frecuencia de
15
Diseño de controladores digitales
- Diseño en el dominio frecuencia
Ejemplo diseño LAG (cont.) Evaluamos los márgenes
resultantes
16
Diseño de controladores digitales
- Diseño en el dominio frecuencia
Ejemplo diseño LAG (cont.) Evaluamos la respuesta
en frecuencia de lazo cerrado
17
Diseño de controladores digitales
- Diseño en el dominio frecuencia
Ejemplo diseño LAG (cont.) Evaluamos la respuesta
temporal ante entrada escalón
18
Diseño de controladores digitales
- Diseño en el dominio frecuencia
Ejemplo diseño LEAD Para la misma planta que en
el diseño LAG
- Especificaciones
- Mantener el error estacionario
- No disminuir el ancho de banda
- Mejorar el transitorio (MF55º)
19
Diseño de controladores digitales
- Diseño en el dominio frecuencia
Ejemplo diseño LEAD (cont.) Evaluamos la
respuesta en frecuencia de
- Mantenemos ganancia de continua (a01).
- MF del sistema sin compensar MF31.5º.
- Adelanto necesario
- Separación polo-cero
MF31.5º
20
Diseño de controladores digitales
- Diseño en el dominio frecuencia
Ejemplo diseño LEAD (cont.) Evaluamos la
respuesta en frecuencia de
- Ubicamos el aporte máximo del comp.para
aprovecharlo mejor
-4.77dB
21
Diseño de controladores digitales
- Diseño en el dominio frecuencia
Ejemplo diseño LEAD (cont.) Evaluamos la
respuesta en frecuencia de
- Evaluamos el MF del sistema compensadoMF44º
Insuficiente
MF44º
22
Diseño de controladores digitales
- Diseño en el dominio frecuencia
Ejemplo diseño LEAD (cont.) Evaluamos la
respuesta en frecuencia de
- Iteramos subiendo el polo
- MF45.4º Insuficiente
MF45.4º
23
Diseño de controladores digitales
- Diseño en el dominio frecuencia
Ejemplo diseño LEAD (cont.) Evaluamos la
respuesta en frecuencia de
- Iteramos subiendo el polo
Diseño OK
MF54.8º
24
Diseño de controladores digitales
- Diseño en el dominio frecuencia
Ejemplo diseño LEAD (cont.) Evaluamos la
respuesta en frecuencia de lazo cerrado
25
Diseño de controladores digitales
- Diseño en el dominio frecuencia
Ejemplo diseño LEAD (cont.) Evaluamos la
respuesta temporal ante entrada escalón
26
Diseño de controladores digitales
- Diseño en el dominio frecuencia
Ejemplos de diseño Comparación
(cont.) Respuestas en frecuencia de lazo abierto
27
Diseño de controladores digitales
- Diseño en el dominio frecuencia
Ejemplos de diseño Comparación
(cont.) Respuestas en frecuencia de lazo cerrado
28
Diseño de controladores digitales
- Diseño en el dominio frecuencia
Ejemplos de diseño Comparación Respuestas
temporales ante entrada escalón - Salida
29
Diseño de controladores digitales
- Diseño en el dominio frecuencia
Ejemplos de diseño Comparación
(cont.) Respuestas temporales ante entrada
escalón Esfuerzo de control
30
Diseño de controladores digitales
- Diseño en el dominio frecuencia
Ejemplo de diseño (Idem al utilizado en LR)
31
Diseño de controladores digitales
- Diseño en el dominio frecuencia
Ejemplo de diseño (cont.) Respuesta en frecuencia
de lazo abierto
32
Diseño de controladores digitales
- Diseño en el dominio frecuencia
Ejemplo de diseño (cont.) Diseño LEAD Respuesta
en frecuencia de lazo abierto
- Mantenemos ganancia de continua (a01).
- MF del sistema sin compensar MF10º.
- Adelanto necesario
- Separación polo-cero
MF10º
33
Diseño de controladores digitales
- Diseño en el dominio frecuencia
Ejemplo de diseño (cont.) Respuesta en frecuencia
de lazo abierto
- Ubicamos el aporte máximo del comp.para
aprovecharlo mejor
-7.83dB
34
Diseño de controladores digitales
- Diseño en el dominio frecuencia
Ejemplo de diseño (cont.) Respuesta en frecuencia
de lazo abierto compensado
- Evaluamos el MF del sistema compensadoMF43.4º
Insuficiente
MF43.4º
35
Diseño de controladores digitales
- Diseño en el dominio frecuencia
Ejemplo de diseño (cont.) Respuesta en frecuencia
de lazo abierto compensado
- Iteramos bajando el cero
MF37.1º Insuficiente
MF37.1º
36
Diseño de controladores digitales
- Diseño en el dominio frecuencia
Ejemplo de diseño (cont.) Respuesta en frecuencia
de lazo abierto compensado
- Iteramos subiendo el polo
MF54.6º Diseño OK
MF54.6º
37
Diseño de controladores digitales
- Diseño en el dominio frecuencia
Ejemplo de diseño (cont.) Respuesta al escalón
del sistema compensado
Cumple especificaciones
38
Diseño de controladores digitales
- Diseño en el dominio frecuencia - Controladores
PD, PI y PID
Ejemplo de diseño (Mismo sistema utilizado en el
LAG)
- Especificaciones
- Error estacionario a la rampa de 0.5
- Mejorar el transitorio (MF55º)
39
Diseño de controladores digitales
- Diseño en el dominio frecuencia - Controladores
PD, PI y PID
Ejemplo de diseño (cont.) Respuesta en frecuencia
de lazo abierto
Controlador PI
40
Diseño de controladores digitales
- Diseño en el dominio frecuencia - Controladores
PD, PI y PID
Ejemplo de diseño (cont.) Respuesta en frecuencia
de lazo abierto
Controlador PI
41
Diseño de controladores digitales
- Diseño en el dominio frecuencia - Controladores
PD, PI y PID
Ejemplo de diseño (cont.) Respuesta temporal
Controlador PI
42
Diseño de controladores digitales
- Diseño en el dominio frecuencia - Controladores
PD, PI y PID
Ejemplo de diseño (cont.) Respuesta en frecuencia
de lazo abierto
Controlador PID
43
Diseño de controladores digitales
- Diseño en el dominio frecuencia - Controladores
PD, PI y PID
Ejemplo de diseño (cont.) Respuesta en frecuencia
de lazo abierto
Controlador PID
44
Diseño de controladores digitales
- Diseño en el dominio frecuencia - Controladores
PD, PI y PID
Ejemplo de diseño (cont.) Respuesta temporal
Controlador PID
Recommended
