
Problem 5 of Homework - PowerPoint PPT Presentation
1 / 104
Title:
Problem 5 of Homework
Description:
... to control robots in a nearly workerless factory was attempted: ... cheesecake. The Roomba robot is most closely identified with: behavior-based robotics. ... – PowerPoint PPT presentation
Number of Views:91
Avg rating:3.0/5.0
Title: Problem 5 of Homework
1
Problem 5 of Homework
2
Problem 5 of Homework
3
Why so hard getting convergence?
4
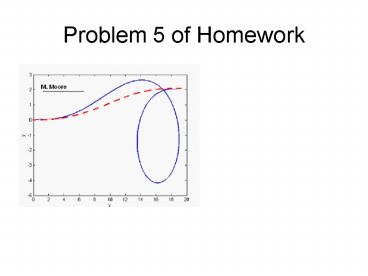
Consider two trajectories.
5
A very small difference in just one of our
parameters accounts for a large difference in
terminal position/orientation
6
A very small difference in just one of our
parameters accounts for a large difference in
terminal position/orientation
7
A very small difference in just one of our
parameters accounts for a large difference in
terminal position/orientation
8
A very small difference in just one of our
parameters accounts for a large difference in
terminal position/orientation
9
Notice that for quite a while the two
trajectories remain close together.
10
This high sensitivity after a longer interval to
small changes is characteristic of many nonlinear
systems.
11
- True or False Kinematics is principally
concerned with the internal torques that act upon
the various robotic members. - True or False The homogeneous transformation
matrix is a 3x3 matrix. - 3. True or False Elements of the
direction-cosine matrix or rotation matrix
can be determined with knowledge of three
Euler-angle values.
12
- True or False Kinematics is principally
concerned with the internal torques that act upon
the various robotic members. - True or False The homogeneous transformation
matrix is a 3x3 matrix. - 3. True or False Elements of the
direction-cosine matrix or rotation matrix
can be determined with knowledge of three
Euler-angle values.
13
- True or False Kinematics is principally
concerned with the internal torques that act upon
the various robotic members. - True or False The homogeneous transformation
matrix is a 3x3 matrix. - 3. True or False Elements of the
direction-cosine matrix or rotation matrix
can be determined with knowledge of three
Euler-angle values.
14
- True or False Kinematics is principally
concerned with the internal torques that act upon
the various robotic members. - True or False The homogeneous transformation
matrix is a 3x3 matrix. - 3. True or False Elements of the
direction-cosine matrix or rotation matrix
can be determined with knowledge of three
Euler-angle values.
15
- True or False The angular velocity of a robots
end-most member, if it is referred to the
coordinate system that is fixed to that rigid
member, is always zero. - True or False The angular velocity of a robots
end-most member, if it is measured with respect
to the coordinate system that is fixed to that
rigid member, is always zero. - 6. True or False The kinetic energy at any
moment of a robots end-most member depends only
upon the velocity of that members mass center
with respect to an inertial coordinate system,
provided that member is rigid.
16
- True or False The angular velocity of a robots
end-most member, if it is referred to the
coordinate system that is fixed to that rigid
member, is always zero. - True or False The angular velocity of a robots
end-most member, if it is measured with respect
to the coordinate system that is fixed to that
rigid member, is always zero. - 6. True or False The kinetic energy at any
moment of a robots end-most member depends only
upon the velocity of that members mass center
with respect to an inertial coordinate system,
provided that member is rigid.
17
- True or False The angular velocity of a robots
end-most member, if it is referred to the
coordinate system that is fixed to that rigid
member, is always zero. - True or False The angular velocity of a robots
end-most member, if it is measured with respect
to the coordinate system that is fixed to that
rigid member, is always zero. - 6. True or False The kinetic energy at any
moment of a robots end-most member depends only
upon the velocity of that members mass center
with respect to an inertial coordinate system,
provided that member is rigid.
18
- True or False The angular velocity of a robots
end-most member, if it is referred to the
coordinate system that is fixed to that rigid
member, is always zero. - True or False The angular velocity of a robots
end-most member, if it is measured with respect
to the coordinate system that is fixed to that
rigid member, is always zero. - 6. True or False The kinetic energy at any
moment of a robots end-most member depends only
upon the velocity of that members mass center
with respect to an inertial coordinate system,
provided that member is rigid.
19
- True or False For two different Cartesian
coordinate systems, there are 12 possible sets of
Euler angles that may be used to specify the
relative orientations of those frames. - True or False Nonholonomic robots forward
kinematics may be expressed in terms of
differential relations but not algebraic
relations between the internal rotations and the
robots external position. - 9.True or False If we manage to return a
holonomic robots internal rotations to the same
angles that were taught to achieve a given pose,
then, provided the robots members remain rigid,
the robot will return to that same pose. - 10.True or False According to the
Denevit-Hartenberg convention, for member i-1, qi
is positive about the Zi axis in accordance with
the right-hand rule.
20
- True or False For two different Cartesian
coordinate systems, there are 12 possible sets of
Euler angles that may be used to specify the
relative orientations of those frames. - True or False Nonholonomic robots forward
kinematics may be expressed in terms of
differential relations but not algebraic
relations between the internal rotations and the
robots external position. - 9.True or False If we manage to return a
holonomic robots internal rotations to the same
angles that were taught to achieve a given pose,
then, provided the robots members remain rigid,
the robot will return to that same pose. - 10.True or False According to the
Denevit-Hartenberg convention, for member i-1, qi
is positive about the Zi axis in accordance with
the right-hand rule.
21
- True or False For two different Cartesian
coordinate systems, there are 12 possible sets of
Euler angles that may be used to specify the
relative orientations of those frames. - True or False Nonholonomic robots forward
kinematics may be expressed in terms of
differential relations but not algebraic
relations between the internal rotations and the
robots external position. - 9.True or False If we manage to return a
holonomic robots internal rotations to the same
angles that were taught to achieve a given pose,
then, provided the robots members remain rigid,
the robot will return to that same pose. - 10.True or False According to the
Denevit-Hartenberg convention, for member i-1, qi
is positive about the Zi axis in accordance with
the right-hand rule.
22
- True or False For two different Cartesian
coordinate systems, there are 12 possible sets of
Euler angles that may be used to specify the
relative orientations of those frames. - True or False Nonholonomic robots forward
kinematics may be expressed in terms of
differential relations but not algebraic
relations between the internal rotations and the
robots external position. - 9.True or False If we manage to return a
holonomic robots internal rotations to the same
angles that were taught to achieve a given pose,
then, provided the robots members remain rigid,
the robot will return to that same pose. - 10.True or False According to the
Denevit-Hartenberg convention, for member i-1, qi
is positive about the Zi axis in accordance with
the right-hand rule.
23
- True or False For two different Cartesian
coordinate systems, there are 12 possible sets of
Euler angles that may be used to specify the
relative orientations of those frames. - True or False Nonholonomic robots forward
kinematics may be expressed in terms of
differential relations but not algebraic
relations between the internal rotations and the
robots external position. - 9.True or False If we manage to return a
holonomic robots internal rotations to the same
angles that were taught to achieve a given pose,
then, provided the robots members remain rigid,
the robot will return to that same pose. - 10.True or False According to the
Denevit-Hartenberg convention, for member i-1, qi
is positive about the Zi axis in accordance with
the right-hand rule.
24
In the 1990s a mobile robot was deployed in
several locations across the country as a test by
the U.S. Dept. of Veterans Affairs to assist in
the harvest of tree-borne fruit. to dispense
gasoline autonomously at filling stations. to
deliver medicines autonomously in hospitals. to
secretly monitor U.S. veterans affairs.
25
In the 1990s a mobile robot was deployed in
several locations across the country as a test by
the U.S. Dept. of Veterans Affairs to assist in
the harvest of tree-borne fruit. to dispense
gasoline autonomously at filling stations. to
deliver medicines autonomously in hospitals. to
secretly monitor U.S. veterans affairs.
26
Early in the 1990s one firm worried about the
imminent release of a Japanese robot that
would autonomously deliver commercial-grade
floor maintenance. dispense gasoline
autonomously at filling stations. deliver
medicines autonomously in hospitals. assist with
the harvest of tree-borne fruit.
27
Early in the 1990s one firm worried about the
imminent release of a Japanese robot that
would autonomously deliver commercial-grade
floor maintenance. dispense gasoline
autonomously at filling stations. deliver
medicines autonomously in hospitals. assist with
the harvest of tree-borne fruit.
28
Robots that operate under the teach-repeat
mode are often taught using unemployed college
professors. a degree-jogging filament. a teach
pendant. a robomaster.
29
Robots that operate under the teach-repeat
mode are often taught using unemployed college
professors. a degree-jogging filament. a teach
pendant. a robomaster.
30
Teach-repeat relies upon the angular-position
servomechanism of each joint rotation. the
rigidity of robots members. the delivery of
each workpiece to the prototype workpieces
position/orientation in space. All of the above.
31
Teach-repeat relies upon the angular-position
servomechanism of each joint rotation. the
rigidity of robots members. the delivery of
each workpiece to the prototype workpieces
position/orientation in space. All of the above.
32
A large and largely unsuccessful effort to apply
calibrated vision to control robots in a nearly
workerless factory was attempted in the 1980s
at IBM. in the 1960s at Nissan. in the 1990s at
Boeing. in the 1980s at GM.
33
A large and largely unsuccessful effort to apply
calibrated vision to control robots in a nearly
workerless factory was attempted in the 1980s
at IBM. in the 1960s at Nissan. in the 1990s at
Boeing. in the 1980s at GM.
34
In 2004 a cry went out from the scientific
community to use a robot to monitor Antarctica
for global warming. service the Hubble
telescope. descend into Mt. St.
Helens. transport spent nuclear fuel into Yucca
Mountain.
35
In 2004 a cry went out from the scientific
community to use a robot to monitor Antarctica
for global warming. service the Hubble
telescope. descend into Mt. St.
Helens. transport spent nuclear fuel into Yucca
Mountain.
36
Visual Servoing makes extensive use
of ultrasound sensors. the matrix
Jacobian. nonholonomic degrees of
freedom. cheesecake.
37
Visual Servoing makes extensive use
of ultrasound sensors. the matrix
Jacobian. nonholonomic degrees of
freedom. cheesecake.
38
The Roomba robot is most closely identified
with behavior-based robotics. teach/repeat. vi
sual servoing. simultaneous localization and
mapping.
39
The Roomba robot is most closely identified
with behavior-based robotics. teach/repeat. vi
sual servoing. simultaneous localization and
mapping.
40
Which of the following is not an instance of the
inverse problem creating a Pixar movie scene
from a geometric/optical model of a childs
bedroom. human recognition in a movie theatre of
the objects in an image of a childs bedroom
presented on the screen. identification of the
flaws in a reactor vessel using ultrasound
responses. solving a crime using fingerprints.
41
Which of the following is not an instance of the
inverse problem creating a Pixar movie scene
from a geometric/optical model of a childs
bedroom. human recognition in a movie theatre of
the objects in an image of a childs bedroom
presented on the screen. identification of the
flaws in a reactor vessel using ultrasound
responses. solving a crime using fingerprints.
42
The intensity of light reflecting off a surface
in any given direction can be measured
in Newtons per degree. foot-candles per solid
radian. Watts per steradian. Joules per
angstrom.
43
The intensity of light reflecting off a surface
in any given direction can be measured
in Newtons per degree. foot-candles per solid
radian. Watts per steradian. Joules per
angstrom.
44
Problem 21
45
(No Transcript)
46
(No Transcript)
47
(No Transcript)
48
(No Transcript)
49
(No Transcript)
50
(No Transcript)
51
(No Transcript)
52
(No Transcript)
53
(No Transcript)
54
(No Transcript)
55
(No Transcript)
56
(No Transcript)
57
(No Transcript)
58
(No Transcript)
59
(No Transcript)
60
(No Transcript)
61
(No Transcript)
62
(No Transcript)
63
(No Transcript)
64
(No Transcript)
65
(No Transcript)
66
(No Transcript)
67
(No Transcript)
68
(No Transcript)
69
(No Transcript)
70
(No Transcript)
71
(No Transcript)
72
(No Transcript)
73
(No Transcript)
74
(No Transcript)
75
(No Transcript)
76
(No Transcript)
77
(No Transcript)
78
(No Transcript)
79
Problem 22
80
l
81
l
82
l
83
l
84
(No Transcript)
85
(No Transcript)
86
(No Transcript)
87
(No Transcript)
88
(No Transcript)
89
(No Transcript)
90
(No Transcript)
91
(No Transcript)
92
(No Transcript)
93
Problem 23
94
ktrans2 (1/2) m2 rG2 . rG2
95
rG2
96
rG2
97
rG2
98
rG2
99
(No Transcript)
100
(No Transcript)
101
(No Transcript)
102
(No Transcript)
103
(No Transcript)
104
(No Transcript)
Recommended
CrystalGraphics Presentations





























