
Instrumenting Wireless Sensor Networks for RealTime Surveillance PowerPoint PPT Presentation
1 / 1
Title: Instrumenting Wireless Sensor Networks for RealTime Surveillance
1
Instrumenting Wireless Sensor Networks for
Real-Time Surveillance
Songhwai Oh, Phoebus Chen, Michael Manzo, and
Shankar Sastry UC Berkeley
- Experiment
- Successfully demonstrated at the DefenseAdvanced
Research Projects Agency (DARPA) Network Embedded
Systems Technology (NEST) final experiment on
August 30, 2005 - 557 Trio motes (144 motes are used for the
tracking demo) - Passive infrared (PIR) motion sensors (range 8m)
- Overview
- Objective
- Track an unknown number of targets using a
wireless sensor network of binary sensors for
real-time surveillance - Issues
- Real-time operation
- Number of targets and initial states of targets
are unknown - Coarse measurements from binary sensors
- No classification information about the
identities of targets - Our Approach
- Multiple layers of data fusion for real-time
operation - Markov chain Monte Carlo data association
(MCMCDA) for multi-target tracking - Architecture
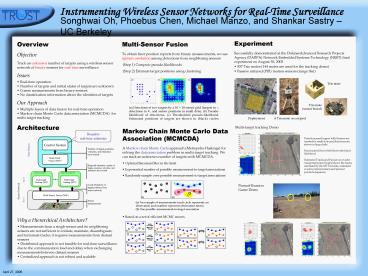
Multi-Sensor Fusion To obtain finer position
reports from binary measurements, we use spatial
correlation among detections from neighboring
sensors (Step 1) Compute pseudo-likelihoods
(Step 2) Estimate target positions using
clustering
Trio mote
Trio mote (sensor board)
(a) Detections of two targets by a 10 10 sensor
grid (targets in , detections in , and sensor
positions in small dots). (b) Pseudo-likelihood
of detections. (c) Thresholded pseudo-likelihood.
Estimated positions of targets are shown in
(black) circles.
Deployment
A Trio mote on a tripod
Multi-target tracking Demo
- Markov Chain Monte Carlo Data Association
(MCMCDA) - A Markov chain Monte Carlo approach
(Metropolis-Hastings) for solving the data
association problem in multi-target tracking. We
can track an unknown number of targets with
MCMCDA. - Optimal Bayesian filter in the limit
- Exponential number of possible
measurement-to-target associations - Randomly sample over possible measurement-to-targ
et associations
Requires real-time estimates
Detection panel (upper left) Sensors are marked
by small dots and detections are shown in large
disks Fusion panel (lower left) shows the fused
likelihood Estimated Tracks and
Pursuer-to-evader Assignment panel (right) shows
the tracks estimated by the MTT module, estimated
evader positions (stars) and pursuer positions
(squares).
Pursuit-Evasion Game Demo
(a) An example of measurements (each circle
represents an observation and numbers represent
observation times). (b) One possible
measurement-to-target association
- Why a Hierarchical Architecture?
- Measurements from a single sensor and its
neighboring sensors are not sufficient to
initiate, maintain, disambiguate, and terminate
tracks it requires measurements from distant
sensors - Distributed approach is not feasible for
real-time surveillance due to the communication
load and delay when exchanging measurements
between distant sensors - Centralized approach is not robust and scalable
- Based on a set of efficient MCMC moves
April 27, 2006
Recommended
