
Teleoperation Using Wave Variables PowerPoint PPT Presentation
1 / 3
Title: Teleoperation Using Wave Variables
1
Teleoperation Using Wave Variables
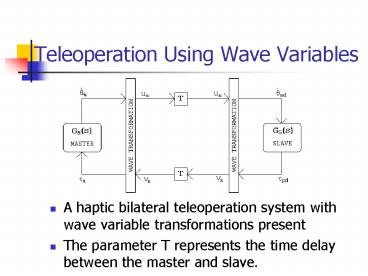
- A haptic bilateral teleoperation system with wave
variable transformations present - The parameter T represents the time delay between
the master and slave.
2
Simulation Results
- The response of a 2-DOF system with a 2T 1 sec
total time delay - The input torques were 3 and -4 N?m, respectively
- Simulation used a fixed Aw where Q is allowed to
be any orthogonal matrix - No matter what Q value is used, the overall
system output will not change
3
Simulation Results
- What do change are the wave variables that are
sent across the communication line - Wave variable vs when Q is the identity matrix,
and a rotation matrix corresponding to a rotation
of 45 degrees - The wave variable will be rotated by the same
amount that Cw and Dw are
Recommended
