
Equilibrium Criteria - PowerPoint PPT Presentation
1 / 24
Title:
Equilibrium Criteria
Description:
rigid, and diathermal (thermal. reservoir at constant V, M) The piston is impermeable, ... The internal boundary is permeable to B only, diathermal, and movable ... – PowerPoint PPT presentation
Number of Views:85
Avg rating:3.0/5.0
Title: Equilibrium Criteria
1
Equilibrium Criteria
- Overview
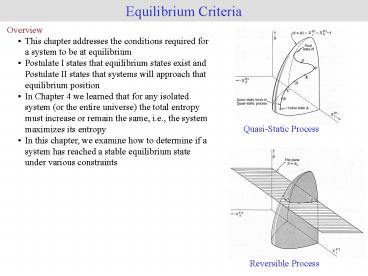
- This chapter addresses the conditions required
for a system to be at equilibrium - Postulate I states that equilibrium states exist
and Postulate II states that systems will
approach that equilibrium position - In Chapter 4 we learned that for any isolated
system (or the entire universe) the total entropy
must increase or remain the same, i.e., the
system maximizes its entropy - In this chapter, we examine how to determine if a
system has reached a stable equilibrium state
under various constraints
Quasi-Static Process
Reversible Process
2
Classification of Equilibrium States
Equilibrium States The figure below illustrates
the four classes of equilibrium states
- Stable following any perturbation (push to the
right or left) the system returns to its original
position - Metastable the system reverts to the original
position after a small perturbation, however a
large perturbation could displace the system to a
lower potential energy - Unstable any minor perturbation will displace
the system to a new state - Neutral the system can be altered by any
perturbation without a change in the systems
potential energy
3
Classification of Equilibrium States
- The Real World
- Most real systems are metastable (e.g., all
organic compounds containing carbon and hydrogen
atoms could attain a more stable state in the
presence of oxygen by reacting to form CO2 and
H2O) - In many cases the barriers to transition to the
more stable state are large enough to prevent the
change from occurring within a reasonable time
period - Obtaining the rate at which these transitions
occur requires a kinetic analysis - To ascertain the stability of a given state, we
consider only minor (virtual) perturbations to a
system - If minor perturbations leave the system
unchanged, we say the original state is a stable
equilibrium state
4
Classification of Equilibrium States
- Numerous Possible Perturbations
- In general, a system can be perturbed through a
variety of mechanisms - For example, in our previous analogy a push to
the right or left can be considered different
perturbation types - Consider the figure below the system is
metastable with respect to a push to the left and
unstable with respect to a push to the right - Therefore, we must classify the stability of a
system with respect to particular kinds of
perturbations
5
Extrema Principles
- Entropy Maximum
- In Chapter 4 we found that for a process
occurring in an isolated system the total entropy
change must be zero or positive - Therefore, for a system with constant total
energy E, constant total volume V, and constant
total mass M - From this analysis, we can make the following
conclusionfor an isolated system to be at
stable equilibrium, the entropymust have a
maximum value withrespect to any allowed
variations
6
Extrema Principles
- Energy Minimum
- One can show that a totally equivalent set of
criteria invoking the total energy E rather than
total entropy S can be used to define the
conditions for a stable equilibrium state - For a system with constant total entropy S,
constant total volume V, and constant total mass
M - From this analysis, we can make the following
conclusionfor a stable equilibrium system at
constant S, V, and M, the total internal energy
must be a minimum
7
Extrema Principles
- Equilibrium Criteria
- To find a stable equilibrium state (entropy
maximum), we vary a given parameter z1 (S is a
function of z1,z2,,zn2) until theentropy is
maximized, i.e., (?S/?z1) 0 and (?2S/?z12) lt 0 - The system is now in a stable equilibrium state
with respect to variations of z1
8
Extrema Principles
- Small Perturbations
- We now analyze small perturbations about some
original state - We propose a small perturbation is which z1 is
altered by dz1, z2 by dz2, etc., and find the
change in entropy by expanding S in a Taylor
series about the conditions of the original
state - with
9
Extrema Principles
- Small Perturbations
- If DS represents the entropy change from the
original assumed equilibrium state to the
perturbed state, and if S is a maximum in the
equilibrium state of an isolated system of
constant E, V, and M, then for all possible
variations originating from a stable equilibrium
state - If S is a smoothly varying function of zi, the
necessary and sufficient conditions for a maximum
in S are - Criterion for equilibrium
- Criterion for stability
10
Extrema Principles
- Energy Route
- An analogous set of conditions can be stipulated
for constantS, V, and M - Here the appropriate potential is the internal
energy - If U is a smoothly varying function of zi, the
necessary and sufficient conditions for a minimum
in U are - Criterion for equilibrium
- Criterion for stability
- Restraints for a composite system
11
Extrema Principles
Equivalence of Entropy Maximization and Energy
Minimization
12
Example 6.1
In the figure below the ball is shown at the
bottom of the well to represent a case of stable
equilibrium. Prove this to be so by considering
a virtual displacement process wherein the ball
moves to a point on the wall, above the bottom.
Develop two proofs, one using entropy
maximization and the other using energy
minimization
13
Use of Other Potential Functions to Define
Equilibrium States
- Alternative Equilibrium Conditions
- Up to this point, we have developed criteria for
equilibrium and stability for systems at constant
U, V, M or constant S, V, M - We now develop the criteria for systems under
different constraints - To determine these criteria, we examine a system
connected to large thermal and work reservoirs
(RT and RP), which hold the temperature and/or
pressure constant - The thermal gate is impermeable, rigid, and
diathermal (thermal reservoir at constant V, M) - The piston is impermeable, frictionless, and
adiabatic (workreservoir at constant S, M) - The entire (global) system is isolated and held
at a constant total S, V, and M
14
Use of Other Potential Functions to Define
Equilibrium States
- Alternative Equilibrium Conditions
- Under the conditions described above, the global
system must adhere to the energy minimum criteria - For any process for which the global system is
originally a stable equilibrium state (S refers
to the global system) - We now look at situations in which the system
interacts with one or more of the reservoirs and
deduce the criteria for equilibrium
15
Use of Other Potential Functions to Define
Equilibrium States
- Piston Unlatched, Thermal Gate Closed (Constant
S, P, M) - Applying the First Law to the pressure reservoir
yields - Or, using the relationships above
- Combining
- Therefore, for a system maintained at constant S,
P, and M, the criteria for equilibrium at
stability are
or
(S, P, M constant)
16
Use of Other Potential Functions to Define
Equilibrium States
- Piston Locked, Thermal Gate Open (Constant T, V,
M) - Applying the First Law to the thermal reservoir
yields - Or, using the relationships above
- Combining
- Therefore, for a system maintained at constant T,
V, and M, the criteria for equilibrium at
stability are
or
(T, V, M constant)
17
Use of Other Potential Functions to Define
Equilibrium States
- Summary
- If both the thermal gate is open and the piston
is unlocked (constant T, P, M) the Gibbs energy
appears as the relevant potential function - We can now generalize our results for a set of
constraints other than S, V, M, equilibrium is
attained by minimizing the partial Lengendre
transform of the energy U that results from
switching to the new constraint variables - In the entropy representation for a set of
constraints other than U, V, M, equilibrium is
attained by maximizing the partial Lengendre
transform of the entropy S that results from
switching to the new constraint variables
18
Use of Other Potential Functions to Define
Equilibrium States
19
Application Membrane Equilibrium
- Membrane Equilibrium
- Consider an isolated, complex system containing
two subsystems, each of which contains a
nonreacting binary mixture of components A and B - The criterion of equilibrium for thecomposite
system is - We now expand this expression in terms of the
properties of the two systems
20
Application Membrane Equilibrium
- Membrane Equilibrium
- Using the constraints dU dU(1) dU(2) 0
(same for V, NA, and NB), the above simplifies
to - We now obtain the criterion for equilibrium for
three special cases
21
Application Membrane Equilibrium
- The internal boundary is permeable to B only,
diathermal, and movable - The additional restraint is
- Equilibrium criteria
- The internal wall is rigid, diathermal, and
permeable to both A and B - Now we have
- Equilibrium criteria
- The internal wall is adiabatic, moveable, and
permeable (A and B) - In this case dU(1) and dU(2) are not zero since
the energy of each subsystem can still change
(e.g., mass transfer, compression) - Equilibrium criteria
22
Application Phase Equilibria
- Phase Equilibria
- A system with more than one phase may be
considered to be a composite of simple systems
with phase-separating membranes that are
moveable, diathermal, and permeable - The equilibrium criterion for a system containing
p phases is - Using the entropy representation of the
Fundamental Equation - The constraints from isolation are
23
Application Phase Equilibria
- Phase Equilibria
- The equilibrium criterion can be reduced using
the method of Lagrange undetermined multipliers
to obtain - The well known conditions for phase equilibria
are now readily apparent
24
Problem 6.6
Recommended
CrystalGraphics Presentations





























