
Rotation of Coordinate Systems PowerPoint PPT Presentation
1 / 12
Title: Rotation of Coordinate Systems
1
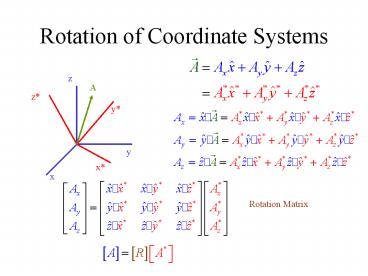
Rotation of Coordinate Systems
z
A
z
y
y
x
x
Rotation Matrix
2
Properties of a Rotation Matrix
Rotation around z axis
z
y
q
y
x
x
3
Euler Angles
z
Steps
z
y
q
- Rotate around z such that x is perpendicular to
z - Rotate around x by q
- Rotate around z by y
y
y
f
x
x
x
4
Euler Angles (continued)
5
Rotating System
z
Now the rotation around z is a function of time
z
y
q
y
y
x
f(t)
x
x
6
Special Matrix
Totally antisymmetric tensor
7
Cross Product Matrix
z
w
wz
y
x
f
8
Second Derivative
For position vector
Centripetal Acceleration
Coriolis Acceleration
Appears to throw object outward
Appears to push object perpendicular to velocity
9
Stationary Orbit Satellite
0
0
0
For stationary orbit
at equator!
10
Falling Body Observed on Earth
11
Falling Body Observed in Space
Ellipitical Orbit
Motion of building during fall
Point of Impact east and south
See Mathematica notebook
Distance
12
Coriolis Force Derivation
Time of fall
Vertical velocity
Horizontal acceleration
Horizontal velocity
Horizontal position
Recommended
