
Genesis Carr, Tomi Chowdhury, Rachel Cogan, Brenda Gutierrez, - PowerPoint PPT Presentation
1 / 1
Title:
Genesis Carr, Tomi Chowdhury, Rachel Cogan, Brenda Gutierrez,
Description:
Erik Jonsson School of Engineering & Computer Science. University of Texas at Dallas ... Driving System ... Instructs the driving system on optimal delivery ... – PowerPoint PPT presentation
Number of Views:86
Avg rating:3.0/5.0
Title: Genesis Carr, Tomi Chowdhury, Rachel Cogan, Brenda Gutierrez,
1
Autonomous Robot IEEE Robotics Competition
Genesis Carr, Tomi Chowdhury, Rachel Cogan,
Brenda Gutierrez, Jason Harris, Christopher
Moravec, Raymond Urbano
genesisc_at_utdallas.edu, txc066000_at_utdallas.edu,
rcc033000_at_utdallas.edu, bmg041000_at_utdallas.edu,
jason.harris_at_student.utdallas.edu,
csm036000_at_utdallas.edu, rru041000_at_utdallas.edu
Department of Electrical Engineering Erik Jonsson
School of Engineering Computer
Science University of Texas at Dallas Richardson,
Texas 75083-0688, U.S.A.
Project Results
Project Goals
- Succeed at the 2008 IEEE Region 5 Student
Robotics Competition - To further research in autonomous hazardous
waste transport by designing and building a robot
that will sort and move containers in a mock
warehouse scenario. - To create a robot that will minimize human
interaction with hazardous material handling
- Successfully built an autonomous vehicle to sort
containers - The Brain
- Uses a Verilog state machine with over 200 states
- Required porting to a micro controller just
before the competition because of complications
with the FPGA board - Weight System
- Weighs the casks using resistive pressure sensors
- Required re-design for competition due to FPGA
complications - Determines weight by using the relative
deflection of a spring-loaded arm while the
servos are off - Arm Control
- Utilizes a two arm design for more efficient pick
up and delivery - Picks up casks smoothly and accurately each time
- Color Vision System
- Identifies bins by comparing the color to preset
color swaths - Avoids differences in lighting conditions by
using this method - Driving System
- Follows lines on the course using a proportional
control algorithm fed by input from the line
sensor bars - Motor Controller
- Controls the motors via the H-Bridge circuitry by
creating a 60Hz pulse width modulation signal - Communication Bus
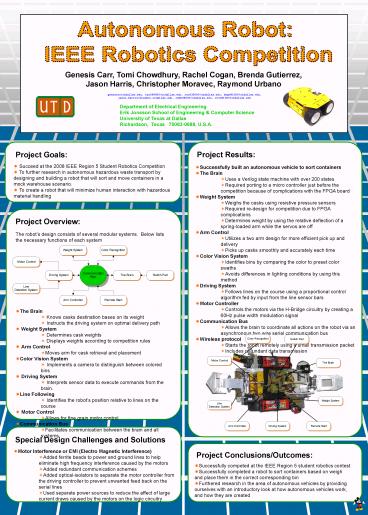
Project Overview
- The robots design consists of several modular
systems. Below lists the necessary functions of
each system - The Brain
- Knows casks destination bases on its weight
- Instructs the driving system on optimal delivery
path - Weight System
- Determines cask weights
- Displays weights according to competition rules
- Arm Control
Special Design Challenges and Solutions
- Motor Interference or EMI (Electro Magnetic
Interference) - Added ferrite beads to power and ground lines to
help eliminate high frequency interference caused
by the motors - Added redundant communication schemes
- Added optical-isolators to separate the motor
controller from the driving controller to prevent
unwanted feed back on the serial lines - Used separate power sources to reduce the affect
of large current draws caused by the motors on
the logic circuitry
Project Conclusions/Outcomes
- Successfully competed at the IEEE Region 5
student robotics contest - Successfully completed a robot to sort containers
based on weigh and place them in the correct
corresponding bin - Furthered research in the area of autonomous
vehicles by providing ourselves with an
introductory look at how autonomous vehicles
work, and how they are created
Recommended
CrystalGraphics Presentations





























