
Chapter 9: Micro Structure Technology and Micromachined Devices - PowerPoint PPT Presentation
1 / 61
Title:
Chapter 9: Micro Structure Technology and Micromachined Devices
Description:
Picture shows the interior chip assembly of the SA30 Crash Sensor, a microsystem ... 1890: Punched cards invented. 1939: Vacuum tubes and mechanical computing ... – PowerPoint PPT presentation
Number of Views:138
Avg rating:3.0/5.0
Title: Chapter 9: Micro Structure Technology and Micromachined Devices
1
Chapter 9Micro Structure Technology
andMicromachined Devices
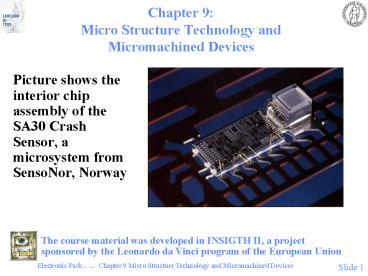
- Picture shows the interior chip assembly of the
SA30 Crash Sensor, a microsystem from SensoNor,
Norway
The course material was developed in INSIGTH II,
a project sponsored by the Leonardo da Vinci
program of the European Union
2
Definitions
- MICRO STRUCTURE TECHNOLOGY can be defined as a
group of three-dimensional micromachining
techniques enabling feature dimensions with
accuracy in the micrometer range. - MICROMACHINED DEVICES can be defined as devices
made by Micro Structure Technology. - These micromachining techniques are mainly based
upon batch organised microelectronic process
technology, either directly adapted techniques
like photolithographics, or modified techniques
such as anisotropic etching techniques. - Some micromachining techniques are specially
developed for this field, e.g., anodic bonding of
micromachined devices.
3
Example SP80 Pressure Sensor
- Developed at SINTEF (earlier Center for
Industrial Research), Norway and manufactured by
Capto as (earlier SensoNor AS, earlier ame),
Borre, Norway. - This sensor visualises the main features and
limitations of micromechanical sensors, and
points out pressure sensing as a main application
for these kinds of sensors.
4
SP80 Principal Design
- A piezoresistive integrated pressure sensor with
the pressure-sensitive diaphragm micromachined in
a silicon chip by anisotropic etching. - Ion implanted piezoresistors in a full Wheatstone
bridge configuration as the electronic sensing
element. - Temperature measuring resistor and a heating
resistor are implanted on the same chip, to
compensate or thermostat the chip to minimise
thermal drifts. - By varying the area and the thickness of the
diaphragm, pressure ranges from 0.5 Bar full
scale pressure up to 60 Bar full scale pressure
can be achieved - Packaged in a transistor header
- Main application areas are within general
instrumentation, metrology and aerospace
application.
5
The SP80 Silicon Chip Set - Drawing
- Consists of diaphragm chip sealed to a support
chip which is mounted on top of a glass tubing
acting as a mounting stand as well as a pressure
port.
6
The SP80 Silicon Chip Set - Picture
- Consists of diaphragm chip sealed to a support
chip which is mounted on top of a glass tubing
acting as a mounting stand as well as a pressure
port.
7
Dimensions and Processing
- The size is 44 mm, thickness approximately 0.3
mm, the diaphragm area is typical 22 mm and the
diaphragm thickness is typical 30 micrometers. - The diaphragm is manufactured by stripping off
the surface oxide of the silicon wafer by means
photolithographic technique in the areas we want
the diaphragm cavity. - Then the wafer is etched in an anisotropic
etching solution with the remaining oxide as
masking film. - This etching solution attacks the single crystal
silicon with different speed in the different
crystal directions. - The etch is extremely slow in the lt1-1-1gt
direction The etch is therefore stopped towards
the (1-1-1) planes. - The chip material is (1-0-0) silicon
- Therefore, the etch cavity is surrounded by four
(1-1-1) planes which have an angle of inclination
of 54.7 degrees relative to the (1-0-0) surface
plane, rendering a cavity with four sloped walls.
8
SP80 Package
- Cross-sectioned view of the SP80 Pressure Sensor
packaged in a transistor header.
9
SP80 Package, continued
- Cross-sectioned view of the SP80 Pressure Sensor
packaged in a transistor header with a top chip
containing a vacuum reference chamber.
10
SP80 Schematic
- The SP80 schematic consists of 4 ion implanted
piezoresistors in a full Wheatstone bridge
configuration as the electronic sensing element.
In addition, a temperature measuring resistor and
a heating resistor are implanted on the same
chip, to compensate or thermostat the chip to
minimise thermal drifts.
11
Picture of SP80 in Transistor Package
- Comment The Norwegian coin is approximately the
size of Ø10 mm
12
Main Features of SP80
- Low non-linearity ( lt - 0.1 )
- Negligible hysteresis ( lt - 0.005 of full scale
output ) - Low long term drift ( typical less than 0.1 per
year ) - Active thermal compensation by utilising the
on-the-chip heating resistor. - Small size.
13
Drawbacks of SP80
- Reference pressure medium must be non-conducting
and non-corrosive to be compatible with the
on-chip sensing elements and electronics. - Safe overload is limited to 3 times rated
pressure as no mechanical overload stop is
implemented. - The devices have no normalised output signal.
Each device has to be individually calibrated
when system installed. - Temperature range is limited (-55 - 125 C) and
uncompensated thermal sensitivity drift is
relative high ( -0.2/C).
14
Applications for Micromachined Sensors and
Microsystems
- The biomedical market
- Blood pressure sensors
- The space, defence and avionics markets
- Accelerometers for rocket navigation
- Micro gravity sensor
- Gyroscopes for navigation
- The agriculture electronics market
- Automotive sensors used in tractors, harvesters
etc. - The off-shore oil exploitation market
- High pressure measurement in oil wells
- Sea wave sensor
- The automotive market
- Acceleration microsystems for air bag systems
- Tire pressure microsystems
- The data and peripheral market
- Disk drive write and read heads
- The consumer market
- Photo diodes in cameras
- Level measurement in white goods appliances.
15
Top10 Success Factors
- 1. Batch organised processing technology
- 2. Microelectronics manufacturing infrastructure
- 3. Research results from solid state technology
and other related fields of microelectronics - 4. Micromachining
- 5. Wafer and chip bonding
- 6. Mechanical material characteristics
- 7. Sensor effects
- 8. Actuator functions
- 9. Integrated electronics
- 10. Combination of features
16
Bottom10 Limiting Factors
- 1. Slow market acceptance
- 2. Low production volumes
- 3. Immature industrial infrastructure
- 4. Poor reliability
- 5. Complex designs and processes
- 6. Immature processing technology
- 7. Immature packaging and interconnection
technologies - 8. Limited research resources
- 9. Limited human resources
- 10. High costs
17
Milestones in the Planar Silicon Processing
Technology (and some other related breakthroughs)
- 1890 Punched cards invented
- 1939 Vacuum tubes and mechanical computing
- 1948 The invention of the transistor
- 1959 The invention of the planar silicon
processing - 1959 The invention of the integrated circuit
- 1964 Mainframe computing
- 1971 The invention of the microprocessor
- 1981 introduction of personal computers
- 1985 1 Megabit random-access-memory chips
available - 1991 64 Megabit random-access-memory chips
available - 1994 Internet in widespread use
- 1994 256 Megabit random-access-memory chips
available - 1995 Microprocessors with more than 3 million
transistors available - 2000 Microprocessors with more than 100 million
transistors available - 2005 1 Gigabit random-access-memory chips
available - 2006 Digital consumerisation (Video on mobile
phones etc) - 2007 ?? The evolution continues
18
Manufacturers of Micromechanical Devices
- The industry structure is highly diversified both
in size, technological basis and organisation
type. - Traditional sensor manufacturers have seen
micromechanical sensors as a natural expansion of
their technological basis, and have taken up
research and production of these sensors as a
part of their activity. - Semiconductor companies have entered this market
as an expansion of their integrated circuit
activity, since they already have most of the
needed equipment and the appropriate marketing
channels. - System companies or original equipment
manufacturers which see micromechanical devices
as a way to boost their systems. - "Start ups", companies having micromechanical
devices as their main business idea. - There are of course companies that does not fit
into any of these types and some are someplace in
between these types.
19
Manufacturers
- USA
- Honeywell, Microswitch, SenSym, IC Sensors,
Motorola, Delco, Foxboro/ICT, Endevco, Kulite,
Lucas/NovaSensor, Michigan Microsensors - Japan
- Hitachi, Toshiba, NEC, Yokagawa Hokushin, Toyota
Motor Company - Europe
- Germany Infineon, Bosch,
- The Netherlands Philips, Microtel, Xensor
Integration - UK Druck
- Switzerland Keller, Kistler
- Finland Vaisala
- Sweden Radi Medical Systems
- Norway SensoNor
20
Research Centers
- USA
- Stanford University, Case Western Reserve
University, University of Michigan, University of
California at Berkeley, University of Wisconsin,
MIT - Japan
- Tohoku University, Kyoto University, Fudan
University, - Europe
- The Netherlands Delft University, Twente
University - Belgium IMEC, Catholic Un of Leuven
- Switzerland University of Neuchâtel, CSEM
- Germany Fraunhofer Institute, IFT Munich,
Fraunhofer Institute, IMT Itzehoe, Techn. Un of
Berlin - Denmark Techn. Un of Denmark
- Finland VTT
- Sweden Uppsala University, KTH/Acreo
- Norway SINTEF
21
Batch Processes Adapted from Microelectronics/IC
Technology with no or Minor Modifications
- Photolithography
- Spin coating
- Etching techniques
- Diffusion of dopants
- Implantation
- Epitaxy
- Chemical vapour deposition (CVD)
- Thin film technology
- Thick film technology
22
Batch Processes Modified from Microelectronics/IC
Technology Processes
- Double-sided photolithography
- Wafer fusion bonding
- LIGA and LIGA-like techniques
- Laser micromachining
23
Batch Processes Adapted or Modified from Other
Technologies than Microelectronics/IC Technology
- Micro stereo lithography
- Micro electro discharge machining
24
Batch Processes Mainly Developed for
Micromachined Devices
- Bulk micromachining
- Surface micromachining
- Anodic wafer bonding
- Fusion bonding (Direct bonding)These
technologies will be commented on the following
slides
25
Bulk Micromachining in Silicon
- Bulk Micromachining in Silicon is here defined as
three-dimensional micromachining in single
crystal silicon by means of photolithographic
etching techniques. - It is also called Bulk Micromechanics in Silicon
or Silicon Micromachining - To understand this technology, some basic insight
in single crystal silicon is needed
26
Crystal Structure of Single Crystal Silicon
- It is a face-centered cubic structure (diamond
structure) with two atoms associated with each
lattice point of the unit cube. One atom is
located in position with xyz coordinates (0, 0,
0), the other in position (a/4, a/4, a/4), a
being the basic unit cell length.
27
Miller Indices for a Plane in a Crystal
- The orientation of of different crystal planes in
the basic unit cell can be described by the
Miller indices (hkl) between parentheses with
each plane defined by a vector description (hx
ky lz) of the direction perpendicular to that
plane. This is related to a coordinate system
oriented in parallel with the side edges of the
basic cell, with the Miller indices reduced to
the smallest possible integers with the same
ratio.
28
Important Crystal Planes in the Silicon Crystal
- (100), (110) and (111) are the three most
important crystal planes of the silicon crystal
structure.
29
Silicon as a Mechanical Material
30
Silicon as an Electronic Material
31
Principles of Micromachining in Silicon
- Micromechanics in silicon is here defined as
three-dimensional micromachining in single
crystal silicon by means of photolithographic
etching techniques. - This definition covers most techniques used to
make micromechanical sensors, although in some
cases additive structures such as polysilicon and
silicon dioxide also have been micromachined by
selective etching techniques, and in some cases
mechanical drilling or other machining methods
are used.
32
Wet Chemical Etching of Silicon using Alkaline
Etchants
- The fundamental reactions are electrochemical in
nature. - Holes are injected from the etching solution into
the silicon and Si-atoms are ionized to Si. - Hydroxyl (OH-) from the etching solution reacts
with Si to hydrated silicon. - Hydrated silicon reacts with a complexing agent
in the etching solution to form a soluble
reaction product. - The soluble reaction product is dissolved into
the etching solution and carried away from the
etching site on the silicon surface into the
solution. - All in all, silicon is etched and the reactant
products are diluted into the etching solution.
33
Isotropic Etching of Silicon
- Typical wet isotropic silicon etches are either
organic or inorganic acids such as acetic acid
(CH3COOH) or hydrogenfluorid (HF) or mixtures
together with water. Often a complexing agent is
needed transforming the oxidized product into
soluble species. - By using selective etching techniques in
combination with etching time some sort of
dimensional control of the etched structure can
be obtained. By using spray etching, agitation or
light enhanced etching preferred etching
directions can be obtained. - Generally, dimensional accuracy below
approximately 30 µmeters are very hard to
achieve, making wet isotropic etching a less
favourable and less used method for
micromechanics in silicon compared to anisotropic
etching.
34
Isotropic Etching of Silicon
- This table shows some popular isotropic etches
35
A Typical Isotropic Etch Cavity
- Isotropic etch cavity in a silicon chip with a
square masking film opening. The result is an
underetched etch pit with rounded structures.
36
Anisotropic Etching of Silicon
- An anisotropic etching solution or orientation
-dependent etching solution will attack the
various crystal directions in single crystal
silicon with different speed. Orientation effects
during this type of preferential etch have been
attributed to crystallographic properties. One
explanation is that the atomic bonds in some
planes are more exposed than in some others. A
suitable designed etching agent will thus attack
and strip away certain plane orientations more
quickly than others. - Typical wet anisotropic silicon etches are
organic or inorganic alkaline solutions used at
elevated temperatures, such as a mixture of
ethylene diamine, pyrocatechol and water
(EDP-etch) or potassium hydroxide and water
(KOH-etch). Hydrazine-water mixture are also
popular anisotropic silicon etchants. In the
following table some examples of anisotropic
etchants are given, including appropriate masking
films. - These typical anisotropic etching solutions are
all characterized by an extremely slow etching
speed in the lt111gt directions of single crystal
silicon, as shown in the example given in the
following figure.
37
Anisotropic Etching of Silicon
38
Anisotropic Lateral Etch Rate
- Lateral etch rate as a function of crystal
direction on (110) silicon wafers for an
EDP-etch. - The composition of the etchant was 1l
ethylene-diamine, 133 ml water, 160 gram
pyrocatechol and 6 gram pyrazine. - The dashed (111) directions are all equivalent
with the (111) direction in single crystal
silicon.
80 micrometer/hour is around 1.3 micrometer/min
39
Anisotropic Etch Cavity in (100) Silicon
- Anisotropic etch cavity in (100) silicon with a
square masking film opening oriented in parallel
with the lt110gt direction. Due to the four-fold
symmetry of the slow-etching (111) planes,
sideways etching is stopped giving a cavity with
four sloped sidewalls. The photography shows such
an etched cavity.
40
Understanding Anisotropic Underetching
- Anisotropic underetching of mask openings
nonparallel with lt110gt direction, and anisotropic
underetching of convex corners. - (a) is a typical pyramidal pit, bounded by the
(111) planes, etched into silicon with an
anisotropic etch through a square hole in an
oxide mask. - (b) is a type of pit which is expected from
anisotropic etch with a slow convex undercut
rate. - (c) is the same mask pattern resulting in an
substantial degree of undercutting using an
etchant with a fast undercut rate such as EDP. - In (d), further etching of (c) produces a
cantilever beam suspended over the pit. - (e) is an illustration of the general rule for
anisotropic etch undercutting assuming a
"sufficiently long" etching time. The reader who
understands (e) has understood the main
principles.
41
Selective Etching of Silicon
- There are four different techniques in use
- Calculate the needed etching time on the basis of
the etching speed of the used etch. This is an
easy, but inaccurate method, as etching speed
varies with the chemical condition of the etch
and upon geometrical factors limiting the
agitation of the etch. Typical accuracy 20
micrometer. - Inspect etch cavity depth in appropriate time
intervals until needed depth is reached. More
time consuming than the above method, but
improved accuracy. Uneven etching depth from
cavity to cavity due to chemical and geometrical
factor is still a problem limiting accuracy,
which is typical 10 micrometer. - Chemical selective techniques stopping the etch
when an impurity doped chemical resistive layer
is reached. Accuracy is typical 3 micrometer. - Electrochemical selective techniques stopping the
etch towards a biased p-n junction. This enhances
passivation very effectively, giving a typical
accuracy of 1 micrometer.
42
Chemical Selective Etching of Silicon
- Chemical selective etching with EPD-etch as a
function of boron doping concentration. The boron
stop layer can be made by diffusion deposition or
implantation on the opposite side of the wafer
compared to the etch cavity, which are both well
known processing techniques.
43
Epitaxial Layer Atop Boron Doped Stop Layer
n-type epitaxial layer
p type boron stop layer
n-type substrate
- The shortcoming of not being able to integrate
electronics in the boron stop layer can be
avoided by depositing an epitaxial layer atop the
stop layer, with doping appropriate as substrate
material for integrated devices.
44
A Typical Etching Dewar for Wet Chemical Etching
of Silicon
45
Electrochemical Selective Etching of Silicon
- Low-doped material can be passivated, both p-type
and n-type. This gives more processing
flexibility, and low-doped silicon can be used as
substrate material for integrated components such
as piezoresistors. - High accuracy of thickness of unetched layer can
be achieved, typical 1micrometer, by using
well-controlled implantation and diffusion
techniques for making the p-n- junction. - This method makes KOH a useful selective etch,
avoiding the health dangers of EDP-etch.
46
Surface Micromachining
- Surface micromachining can be defined as a set of
methods to make three-dimensional surface
structures, with deposition of thin films as
additive technique and selective etching of the
deposited thin films as subtractive techniques. - In practice, single crystal silicon wafer is the
dominant substrate material, and chemical vapor
deposited (CVD) polysilicon is mostly used as the
material making up the three-dimensional surface
structures.
47
Surface Micromachining, continued
- A main advantage, compared to bulk
micromachining, is that it does not need double
sided processing (back side processing) of the
wafers. - The main additive deposition techniques are
evaporation, sputtering, chemical vapor
deposition (CVD), and variants of these. - The main subtractive methods are selective wet
etching and dry plasma etching. - Photolitography is used for pattern definition.
- The use of sacrificial layers is important. With
this method, etching of the sacrificial layers
underneath non-etched thin film structures can be
done. In this way several three-dimensional
surface structures can be made, such as cavities,
supported microbeams, microstrings, diaphragms,
lateral mobile microelements etc.
48
Micrograph of a Surface Micromachined Structure
- Lateral mobile polysilicon microwheels on a
silicon substrate fabricated by surface
micromachining. Each wheels is free to rotate
around its axis at the center of the stud
element, which is fixed against the substrate and
thus keeps the wheel in place. The wheels have
gear teeth to show a possible gear function.
49
Process Sequence
- The process sequence for fabricating laterally
mobile elements, such as the microwheel shown in
Photo XIII.2, is schematically depicted in Figure
XIII.12. - First (a), an oxide film is grown on the silicon
wafer. - Then (b), a polycrystalline film is deposited by
chemical vapor deposition (CVD), and openings are
defined and etched out using standard
photolithography (c). - A second oxide layer is deposited by CVD (d), an
opening in the oxide is etched using a second
lithographic mask, and a second polysilicon film
is deposited and patterned with a third mask (e).
- Finally (f), the sacrificial oxide layers are
removed by selective etching in hydrofluoric acid
(HF), leaving the first polysilicon film free to
move laterally, and the second polysilicon film
as a supporting element fixed to the substrate.
50
Process Sequence Diagram
- Figure XIII.12 Process sequence for the
fabrication of laterally mobile structures using
surface micromachining and sacrificial layer
technique.
51
Examples of Sensor Elements Using Surface
Micromachining
- Sensor elements can be made by surface
micromachining by either using thin films with
sensing effects, such zinc oxide ZnO with
piezoelectric field, or using mechanical sensing
properties such as variable air gap elements
and/or vibrating structures. - An example of such a sensor, the Berkeley
Polysilicon Microbridge Integrated Vapor Sensor.
This sensor has a surface micromachined
polysilicon microbridge. This sensor uses the
vibrating structure sensing principle, with
vibration activation and vibrating sensing by
means of the capacitance between the bridge and
the substrate. (Coulomb force activation and
capacitance change sensing)
52
Anodic Wafer Bonding
- Can be defined as a method of electrostatically
bonding two dissimilar materials together to form
a strong, hermetic seal that involves little
alteration in the shape, size, and dimensions of
the members making up the joint. - It is a high yield wafer-to-wafer sealing method
that makes it possible to obtain hermetic seals.
The technique was first developed for
silicon-to-glass anodic wafer bonding, and has
later been further developed to
silicon-to-silicon anodic wafer bonding and
silicon-to-thin film anodic wafer bonding.
53
Anodic Wafer Bonding Schematic View
- Schematic view of silicon-to-silicon anodic
bonding and silicon-to-glass anodic bonding.
54
Example Digital Micromirror Device (DMD) from
Texas Instruments
- The device is using very advanced surface
micromachining of thin Al alloys on Si substrates
containing CMOS drive electronics
55
Picture of the packaged DMDs
- The DMDs are pixel devices
- Here are the VGA (640x480), the SVGA (800x600)
and the XGA (1024x768) devices shown
56
Principle of Operation for the DMD
- The hinge system of each pixel structure enables
electronic control mirror position.
57
Picture of Digital Micromirror Device
- The device is packaged in an elastomer connect
package with a glass window. Here shown mounted
on a PCB with back end drive electronics
58
The Davis DPX 16 Projector using the TI Digital
Micromirror Device
- XGA resolution (1024 x 768 pixels)
- 2.3 kg weight
- 1000 Lumens brightness
59
The Zeiss Optical Engine for the DP X16 Projector
- Advanced optics
- Small size and low weight
60
The Zeiss Optical Engine for the DP X16
Projector Modelling
- Mechanical modelling using ProEngineer Design
Tools
61
Example The SA30 Crash Sensor from SensoNor
- This is a good example of the features of
microsystems please refer to the separate slide
presentation
Recommended
CrystalGraphics Presentations





























