
Nonlinear Control PowerPoint PPT Presentation
1 / 81
Title: Nonlinear Control
1
Nonlinear Control
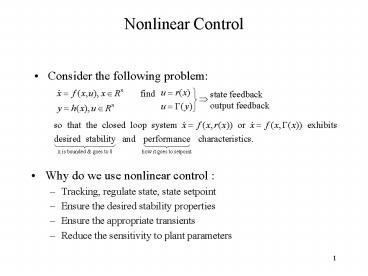
- Consider the following problem
- Why do we use nonlinear control
- Tracking, regulate state, state setpoint
- Ensure the desired stability properties
- Ensure the appropriate transients
- Reduce the sensitivity to plant parameters
2
Nonlinear Control Vs. Linear Control
- Why not always use a linear controller ?
- It just may not work.
Ex
Choose
Then
We see that the system cant be made
asymptotically stable at
On the other hand, a nonlinear feedback does
exist
Then
Asymptotically stable if
3
Example
- Even if a linear feedback exists, nonlinear one
may be better.
Ex
4
Example (continued)
5
Example (continued)
sliding line
Created a new trajectory the system is
insensitive to disturbance in the sliding regime
Variable structure control
6
The Tracking Problem
7
The Tracking Problem (continued)
8
Adaptive Control
9
Adaptive Control (continued)
10
Adaptive Control (continued)
11
Robust (Sliding Mode) Control
12
Robust (Sliding Mode) Control (continued)
13
Robust (Sliding Mode) Control (continued)
14
Robust (Sliding Mode) Control (continued)
15
Robust (Sliding Mode) Control (continued)
16
Robust (Sliding Mode) Control (continued)
17
Robust (Sliding Mode) Control (continued)
18
Learning Control
19
Learning Control (continued)
20
Learning Control (continued)
21
The Tracking Problem, Revisited
22
The Tracking Problem, Revisited (continued)
23
The Tracking Problem, Revisited (continued)
24
The Tracking Problem, Revisited (continued)
25
Continuous Asymptotic Tracking
26
Continuous Asymptotic Tracking (continued)
27
Continuous Asymptotic Tracking (continued)
28
Continuous Asymptotic Tracking (continued)
29
Continuous Asymptotic Tracking (continued)
30
Continuous Asymptotic Tracking (continued)
31
Continuous Asymptotic Tracking (continued)
32
Continuous Asymptotic Tracking (continued)
33
Continuous Asymptotic Tracking (continued)
34
Continuous Asymptotic Tracking (continued)
35
Continuous Asymptotic Tracking (continued)
36
Feedback Linearization Problem
37
Feedback Linearization Problem (continued)
38
Feedback Linearization Problem (continued)
39
Previous Problem Using a Robust Approach
40
Previous Problem Using a Robust Approach
41
Observers
42
Observers (continued)
43
Observers (continued)
44
Observers (continued)
45
Observers (continued)
46
Observers (continued)
47
Observers (continued)
48
Observers (continued)
49
Combining Observers Controllers
50
Combining Observers Controllers (continued)
51
Combining Observers Controllers (continued)
52
Combining Observers Controllers (continued)
53
Combining Observers Controllers (continued)
54
Combining Observers Controllers (continued)
55
Combining Observers Controllers (continued)
56
Filter Based Control
57
Filtering Control (continued)
58
Filtering Control (continued)
59
Filtering Control (continued)
60
Filtering Control (continued)
61
Filtering Control (continued)
62
Filtering Control (continued)
63
Filtering Control (continued)
64
Adaptive Approach
65
Adaptive Approach (continued)
66
Adaptive Approach (continued)
67
Adaptive Approach (continued)
68
Adaptive Approach (continued)
69
Adaptive Approach (continued)
70
Variable Structure Observer
71
Variable Structure Observer (continued)
72
Variable Structure Observer (continued)
73
Variable Structure Observer (continued)
74
Variable Structure Observer (continued)
75
Filtering Control, Revisited
76
Filtering Control, Revisited (continued)
77
Filtering Control, Revisited (continued)
78
Filtering Control, Revisited (continued)
79
Filtering Control, Revisited (continued)
80
Filtering Control, Revisited (continued)
81
Filtering Control, Revisited (continued)
Recommended
