
NASA Relevance: PowerPoint PPT Presentation
1 / 10
Title: NASA Relevance:
1
SODAS Self-Organizing Ontogenetic Development
for Autonomous Adaptive Systems PI Robert
Kozma, U of Memphis (8/19/2003)
- Goal Develop a bottom-up approach to link brain
dynamics to goal-oriented behavior in autonomous
systems to achieve flexible and robust operation. - Objectives
- Develop dynamical fusion of sensory information
into a coherent picture from multiple sensory
modalities. - Design a method of self-organized formation of
embodied categories based on chaotic dynamical
principles. - Establish action-oriented representations capable
of affording opportunities for action by
autonomous agents. - Self-organizing development of increasingly
sophisticated skills, behaviors, and goals in
autonomous agents. - Key Innovation
- Development of nonlinear, mesoscopic space-time
neurodynamics using chaos theory to understand
and simulate the emergence of meaningful patterns
of neural activity in biological artificial
systems.
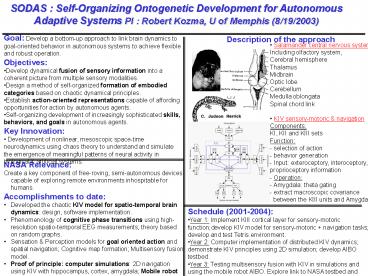
Description of the approach
- Salamander central nervous system
- Including olfactory system,
- Cerebral hemisphere
- Thalamus
- Midbrain
- Optic lobe
- Cerebellum
- Medulla oblongata
- Spinal chord link
- KIV sensory-motoric navigation
- Components
- KI, KII and KIII sets
- Function
- - selection of action
- - behavior generation
- - Input exteroceptory, interoceptory,
proprioceptory information - - Operation
- - Amygdala theta gating
- NASA Relevance
- Create a key component of free-roving,
semi-autonomous devices capable of exploring
remote environments inhospitable for humans. - Accomplishments to date
- Developed the chaotic KIV model for
spatio-temporal brain dynamics design, software
implementation. - Phenomenology of cognitive phase transitions
using high-resolution spatio-temporal EEG
measurements theory based on random graphs. - Sensation Perception models for goal oriented
action and spatial navigation Cognitive map
formation Multisensory fusion model. - Proof of principle computer simulations 2D
navigation using KIV with hippocampus, cortex,
amygdala Mobile robot AIBO testbed.
Participants U of Memphis (CND Lab) UC Berkeley
(Freeman Lab) UW Hospital (Holmes EEG) U
Florida (Principe CNEL) Kalamazoo Hung. Acad.
Sci. (Erdi, Complex Systems)
- Schedule (2001-2004)
- Year 1 Implement KIII cortical layer for
sensory-motoric functiondevelop KIV model for
sensory-motoric navigation tasks develop and
test Tetris environment. - Year 2 Computer implementation of distributed
KIV dynamics demonstrate KIV principles using 2D
simulation develop AIBO testbed. - Year 3 Testing multisensory fusion with KIV in
simulations and using the mobile robot AIBO.
Explore link to NASA testbed and outline goals
for future integration of embodied cognition.
2
SODAS RESEARCH ACHIEVEMENTS An Overview
Achievement statement Research has been
conducted according to the plan in the following
three major fields A. Establishing the KIV
chaotic model of brain dynamics B.
Demonstrating a system that accomplishes goal-
oriented behavior integrated with sensory
perception C. Implementing the design principles
in software and hardware domains
A. Modeling spatio-temporal dynamics of
brains 1. Development of the KIV Model of
sensory perception and navigation in the
cortico-hippocampal system 2. Chaotic resonance
studies theoretical and numerical analysis of
chaotic behavior in K sets in noiseless and noisy
conditions 3. Phase transitions in biological and
mathematical/computational domains
C. Implementation environments in Software and
Hardware Domains 7. Using Khepera software
simulator to implement cognitive map learning
in simple 2D environment using multiple
sensory modalities 8. Implement KIV model for
adaptive behavior for a navigation task in a
software environment. 9. Establishing mobile
robot environment using AIBO sensory-motoric
cycle and exploring the possibility of using
NASA rover testbed
B. Sensation and perception in the context of
goal-oriented behavior 4. Devise new methods of
analysis of high spatial resolution EEG
activity measurements 5. Design mechanisms for
autonomous generation of cognitive maps
based on local sensory information only
(single modality) 6. Develop a method of
multi-sensory learning and action generation
in the KIV model of the brain
3
NEURODYNAMICS OF GOAL-ORIENTED BEHAVIOR in KIV
- Goal To develop a central processor for
autonomous robots that will enable them to
understand instructions and carry out required
tasks adaptively with minimal guidance from
controllers. - Objectives
- Devise a schematic diagram that emulates the
limbic system of brains to support orientation
and operation in environments through acquisition
of familiarity by exploration and learning the
KIV set. - Develop the theory of nonlinear dynamics of
brains to use the KIV. - Key Innovation
- Embodiment of the main architectural and
functional elements of the limbic system in a
simplified comprehensive framework. - Analysis of the large-scale dynamics of animal
and human brains in the genesis of intentional
behavior requiring multicortical integration.
Description Part A. Schematic Diagram
- NASA Relevance
- Enable intelligent autonomous robots for remote
missions with capacity for on-site situation
evaluation and decision making. - Accomplishments to date
- A. Design and implement a model for a
multisensory system that will support collection
of data on internal and external environments and
relate the data to orientation and location of
the robot and its action selection in structured,
simulated environments. - B. Devising new methods of analysis of
electroencephalographic (EEG) activity in animals
and humans that increase ten-fold the temporal
and spatial resolution of neural activity over
prior art. These novel methods give insight into
the neurobiological mechanism of intentional
action in animals.
Schedule
The schematic diagram is shown for the KIV set.
It is composed of three KIII sets that are used
to process three kinds of sensory data External
environmental input as the device moves in
space. Internal environmental input regarding
the state of the robot, such as battery charge,
temperature, energy expenditure rate.
Orientation information that is required for
successful operations into the external
environment through the brain stem BS.
Limbic dynamics is indicated by the blue arrows
into the brain stem.
4
SODAS COMPONENTS CORTICAL KIII
Components PG - periglomeruli -gt
preprocessing OB - olfactory bulb-gt
classifying AON anterior olfactory nucleus-gt
control PC - prepyriform cortex-gt
compare/decide Function - WHAT? - Input
Exteroceptors - Classification/pattern
recognition - Long term memory using
reinforcement habituation Operation - Sensory
stimulus induced destabilization - 1st order
phase transition
5
SODAS COMPONENTS HIPPOCAMPAL FORMATION KIII
Components DG - dentate gyrus -gt compress,
preproc CA3 -gt classifying in AM patterns CA2 -gt
control, convergence/divergence CA1 -gt
compare/decision making Function - WHERE? -
Input Orientation beacons - Operating cognitive
map for orientation - Short term memory by stack
data store - Long term memory with
reinforcement Operation - shaping the attractor
landscape if mismatch experienced between
sensing and intention
6
SODAS COMPONENTS MIDLINE FOREBRAIN (KIII)
Components BC - basal ganglia -gt bias control HT
- hypothalamus -gt classify DB - diagonal band -gt
chaos control Spt - septum -gt compare/decision Fu
nction - WHY? - influence the operation of
other KIIIs and the KIV - use info about
internal state - Input Interoceptors -
Operation - simplified approach - reward
movement - constrained by resource/battery
7
SODAS KIV Model for Sensory-Induced Motoric and
Navigation Tasks
- Goals of the KIV model
- Describe the cortico-hippocampal system for
robust spatial planning and orientation functions
- Implement different types of dynamic activity and
to study how these activity patterns contribute
to the emergence of spatial encoding in the form
of cognitive maps - KIV level Properties
- - high level of autonomy of KIII units (99)
- - an aperiodic carrier in the gamma range
carrying information by AM and gated at rates in
the theta range (shared gt1)
8
SODAS OPERATION OF KIV AT MACROSCOPIC LEVEL
- KIV maintains a state space dominated by a
high-dimensional, flexible, evolving attractor
landscape. - Input is by wave packets at the mesoscopic level
from multiple KIII sets that overlap but need not
be synchronous. - Operation is by global phase transitions induced
aperiodically by spatial integration of the wave
packets. The transitions lead to hemisphere-wide
spatial AM patterns of beta-gamma oscillations. - Output is provided by the spatio-temporal
integration at subcortical targets simultaneously
of the (small) covariant fraction of the total
variance of hemispheric neural activity.
9
(No Transcript)
10
NEURODYNAMICS OF GOAL-ORIENTED BEHAVIOR Experiment
al Findings (UC Berkeley, UW Harborview Hospital)
Description Part B. Four new fundamental
principles of nonlocal, nonconvergent brain
dynamics
- Self-organizing criticality, shown by fractal
spectra
- Phase transitions, shown by the Hilbert transform
The Hilbert transform gives The time derivative
of EEG From which instantaneous Phase is
calculated. This reveals sudden jumps in
the rate of change demarcating time points at
which cortex undergoes phase transition from
one attractor basin to another, changing its
state.
Both temporal and spatial spectra are 1/fa in
form where ? 2 2 is compatible with Brownian
noise. The spectra show that brains can hold
themselves at the edge of stability, so that
they can change virtually instantaneously to meet
unexpected alterations in their inner and outer
environments. The theta band is 3-7 Hz in humans.
- Chaotic itinerancy, shown by repeated transitions
- Anomalous dispersion, shown by high group
velocity
The transitions take place simultaneously over
distances much greater than cortical columns,
essentially at zero time lag. The mechanism
utilizes sensitivity to initial conditions of a
chaotic system to hair-trigger multiple
populations in coordination.
Transitions are revealed by the time
derivative of the analytic phase in scalp
records, taking place at rates of 7-12 Hz
alpha. The events make a cortical clock to
synchronize activity widely..
Recommended
