
Tracking system - PowerPoint PPT Presentation
1 / 56
Title:
Tracking system
Description:
Danica Kragic. Motivation. Manipulating objects in domestic environments ... Danica Kragic. Object Recognition. Removes ... Danica Kragic. Pose Estimation ... – PowerPoint PPT presentation
Number of Views:88
Avg rating:3.0/5.0
Title: Tracking system
1
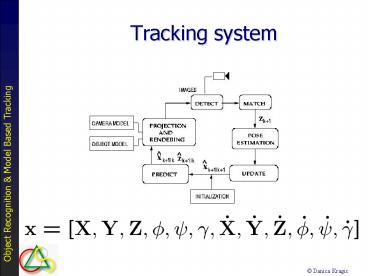
Tracking system
2
Motivation
- Manipulating objects in domestic environments
- Localization / Navigation
- Object Recognition
- Servoing Tracking
- Grasping Pose estimation
3
Steps
- Recognition (2D)
- Tracking (2D)
- Pose estimation (3D)
- Initial pose estimation
Where in the image ?
Where in the world ?
4
Initial Pose Estimation
- Recognition/Tracking Pose estimation
- (x,y) (X,Y,Z, f,
y, g)
5
Example Objects
6
Characteristics
- Simple geometry (polyhedra, cones, cylinders)
- Specular surfaces
- Background
- Illumination
- Slippery objects
7
Characteristics
- Simple geometry wireframe models
- Specular surfaces - ll
- Illumination - ll
- Background - ll
- Highly texture appearance
- Slippery objects power grasps
8
Model Based Techniques
- Appearance based methods
- Geometry based methods
- 3D wireframe models
- Complete pose estimation
- Techniques from computer graphics used for
rendering
FUSION!
9
Object Recognition
- Removes background, preserves object.
- Necessary to raise the signal to noise ratio, for
the pose estimatior. - Solved using color cooccurrence histograms.
10
Pose Estimation
- An apperance based method is used to recognize
the object, and estimate an initial pose. - A geometric model based method is used to obtain
an accurate pose. - Algorithm combines the robustness of appearance
based methods with the accuracy of feature based
methods.
11
(No Transcript)
12
(No Transcript)
13
Color Cooccurrence Histograms
- Apperance based method.
- Based on color cues only.
- Superior to standard color histograms.
- Invariant to translation and rotation.
- Robust towards scale changes.
14
Building Color Cooccurrence Histograms
- All pairs of pixels within a certain radius
contribute to the histogram. - Example 4x4 image with 3 colors, and a maximum
radius of 3 pixels.
Histogram
15
Building Color Cooccurrence Histograms
- When all pairs have been counted, the histogram
is normalized. Each bin is divided with the total
number of pixel pairs.
50
Histogram
16
Color Cooccurrence Histograms - Matching
- A common histogram matching method is used.
- Reduces the effect of background noise, as
unexpected colors will not penalize the match
value.
17
Color Quantization
- Before the histogram can be built, the colors in
the image need to be quantized. This is done
using k-means clustering.
Red
Green
18
Color Quantization
- Images are normalized prior to quantization, in
order to decrease the effect of varying lighting
conditions. - Only the red and green components are preserved.
- Performance equal to RGB and HSV.
Red
Green
19
Color Constancy Problem
- If lighting conditions change, colors may fall
out of their original cluster, or even worse,
into another one.
Red
green light
Green
20
Object Segmentation - Training
- The system was trained using both front and back
sides of the objects. - The background of the training images was
manually removed before training.
21
Object Segmentation
- A search window scans through the image,
comparing the cooccurrence histogram with the
stored histogram from the training images. The
result is a vote matrix.
22
Object Segmentation
- From the vote matrix, segmentation windows are
contructed. - Starting from the global maximum, adjacent rows
and columns are added as long as the vote values
give sufficient support.
23
Object Segmentation - Results
- Out of 50 test images, 49 objects were
successfully segmented. - Average segmentation time was 1.7 s on a 500 MHz
Sun station.
24
Pose Estimation
- The geometric model based pose estimator requires
an initial pose to converge. The initial pose is
estimated using color cooccurrence histograms.
25
Pose Estimation - Training
- 70 training images were used.
- The pose of the object varied over the training
images. - The correct pose of the object in the training
image was stored, together with the cooccurrence
histogram.
26
Pose Estimation
- The object with the unknown pose is compared to
each of the training examples. The result is a
match value graph.
27
Pose Estimation
- The match value graph is filtered using a
Gaussian kernel. - Superior method compared to a nearest-neighbor
approach.
28
Initial Pose Estimation
- Appearance based
29
Principle Component Analisys
- Learning stage compressing image set using
eigenspace representation PCA PCA - Pose recognition stage closest point search on
appearance manifold PCA - Fitting stage closest line search for pose
refinement
30
PCA i(q)
- Pose
- Appearance
- Eigenstructure
decomposition
problem - PCA
31
PCA
- Implicit covariance matrix
(conjugate gradient
method) - PCA
32
PCA
- Pose determination
- PCA
33
Initialization by PCA
34
Geometric Model Based Pose Estimation
- Finally, the algorithm was integrated with the
model based pose estimator.
35
Geometric Model Based Pose Estimation
36
Local refinement by tracking
- H (14 0 60 15 6 5) mm, deg
37
Modeling
38
Modeling
39
Pose estimation
- DeMenthon and Davis 1995
- Orthographic projection
- Iterative method
- No initial guess needed
- This step is followed by an extension of Lowes
nonlinear approach - (Canceroni, Araujo and Brown et al.)
40
Tracking
- Lie algebra approach
- Rigid body motion SE(3) (6D Lie group)
-
41
Image motion
- with
- L - observed motion in an image point
i
42
Normal flow
43
Rendering example
44
3D pose update
- The change in pose is estimated using least
square approach - where a represents the quantities of Euclidian
motion
i
45
3D pose update
46
Examples
47
Examples
48
Example
49
Task 1 Align and Track
50
Task 1 Align and Track
51
Task 2 Object Positioning
52
(No Transcript)
53
(No Transcript)
54
Task 3 - Insertion
55
Insertion task
- How much
- a-priori info
- can we used?
56
Pick and Place
Recommended
CrystalGraphics Presentations





























