
IO Software Layers - PowerPoint PPT Presentation
1 / 15
Title:
IO Software Layers
Description:
Abstraction. Goals of I/O Software. Device independence. Uniform naming ... Simple, abstract definition of device no size limits or blocking factors ... – PowerPoint PPT presentation
Number of Views:144
Avg rating:3.0/5.0
Title: IO Software Layers
1
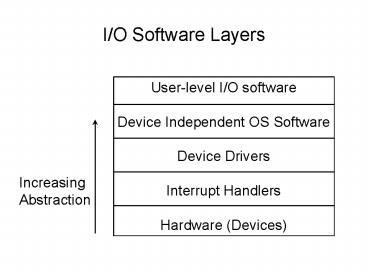
I/O Software Layers
Increasing Abstraction
2
Goals of I/O Software
- Device independence
- Uniform naming
- Example Unix mounts devices to special file
names - Error handling
- Synchronous/asynchronous I/O (blocking vs.
non-blocking) - I/O appears to be blocking to user programs, but
CPU is doing other activities while I/O occurs in
background - Buffering data from devices does not go
straight to main memory, but is instead stored in
a buffer on the device
3
Interrupt Handlers
- Handles interrupts (requests for I/O)
- Does a full context switch to interrupt handler
- Unblocks device driver after I/O is done
4
Device Drivers
- Blocks itself as it waits for I/O to be completed
and interrupt occurs - Possible implementation of blocking
- Up/down on semaphores
- Wait for condition or message
- Includes device-specific code written by
manufacturer - Driver usually part of OS kernel
- Unix kernel compiled with device drivers
- Linux uses loadable modules which are chunks of
code loaded into kernel while system is running - Windows dynamically loaded into system at
startup and plug-n-play
5
Device Drivers
- Functions
- Accept read/write requests from
device-independent OS software - Initialize device
- Manage power requirements
- Checks device status is device busy?
- Issues commands (read/write) to device and checks
if command suceeded - Error handling re-issue command or return error
code to caller - Must be reentrant driver may be called to
handle a second interrupt while still working on
the first - Must be able to abort I/O without corrupting
kernel structures
6
Device-Independent OS Software
- Boundary between device driver and
device-independent software varies between
systems and devices - Typical functions
- Uniform interface for device drivers
- Buffering
- What to do when buffer fills up?
- What to do if memory buffer is paged out
- Double-buffering 2 buffers, 1 for current use
into which user writes, 2nd to be copied to/from
main memory after it is filled - Error reporting
- Retry I/O or report to user with error code
- Identifies device error vs. programming error
- Allocating and releasing dedicated devices
block and queue processes requesting devices that
can be used by only one process at a time - Device-independent block size hide difference
between disks with different sector sizes or
streaming data
7
User-level I/O (APIs)
- What API programmer wants
- Blocking and non-blocking calls
- Simple return code
- No need to buffer
- Simple, abstract definition of device no size
limits or blocking factors - No visible concurrent use of shared devices
- No knowledge of physical allocation
- Uniform naming
- Easy installation of new devices
8
User-level I/O (APIs)
- User-level I/O usually implemented in libraries
linked with user programs - Example printf, write
- User level I/O programs spooler (daemon)
- Print spooler
- Process generates file and puts in directory of
spooler to be printed - Only daemon has permission to use printers
special file (mounted name) - Network spooler
- newsgroups, mail
- Collects and transmits many messages at once
9
Device Configuration
- Sysadmins goal one OS image that can be run on
different machines, prepared in each case for - Different set of devices
- Different number of each device
- At different addresses (IRQ, DMA, bus)
- Non-exclusive possibilities
- Static configuration procedure performed when OS
executable is created - Dynamic auto-configuration at boot time
- Loadable drivers configured at run-time
10
Device Configuration Static
- When making OS image, run /usr/sbin/config with
input file that describes - All devices that might exist
- All addresses at which devices might be located
- /usr/sbin/config outputs Makefile, various .c
and .h files to be compiled as part of the kernel - With these files, kernel boots knowing all
possible configurations
11
Device Configuration Auto-configuration
- Statically configured OS image contains device
driver code for all possible devices, but want to
allocate data structures only for devices that
are present - 2 ways to reduce useless device driver code in OS
image - Carefully specify minimum set of possible devices
based on machines intended use (examples
client vs. servers) - Run-time loadable device drivers
- Auto-configuration performed at boot-time to
determine which subset of devices are actually
installed using probe and attach - For each possible device, drivers probe routine
is called with possible address of I/O registers
as arguments
12
Device Configuration Auto-configuration
- probe routine
- Install special temporary interrupt vector with
same entries in every possible slot since IRQ
number may be unknown - Tell controller to interrupt
- Wait for interrupt
- Fall through no interrupt means that controller
(and hence, device) is absent - If interrupt happens, device is present, and
interrupt handler completes proper installation
using attach - attach initializes hardware and device state
- Example for disk, attach will identify geometry
and specify partition table found at beginning of
disk
13
Device Configuration Loadable Device Drivers
- Motivations
- Static configuration encourages over-inclusion of
drivers (taking up a lot of space) - Avoid reboots
- Easier device driver debugging
- Dynamic loading mechanism can be used for other
types of modules - At boot time, after initial configuration, place
special routine in open slot of all major device
numbers (names) that do not have drivers - Special routine loads and initializes driver
- Loaded driver specifies whether to unload on
closing of device - If yes, special close routine is installed that
unloads
14
Windows Plug-n-play
- Another method of boot-time device discovery
initialization - Includes some run-time events such as device
insert/removal - Combination of efforts by OS, hardware, and
device driver - Device driver must communicate with and is
subordinate to OSs PnP manager - Device requests these resources from PnP
- IRQ
- DMA channel
- I/O port
- Memory range
- Device driver supplies set of procedures for its
services - Device entry initializes driver
- Add device called by PnP manager for each
device
15
Windows Plug-n-play Implementation
- Option 1 One driver can do all work by itself to
interface with device - Option 2 Drivers may be stacked
- Requests are passed through series of drivers,
each doing part of the work - Examples
- separate bus interface with device and device
control - Separate error-checking modules
Recommended
CrystalGraphics Presentations





























