
Our contributions PowerPoint PPT Presentation
1 / 2
Title: Our contributions
1
Edwin Olson, MITMatthew Walter, MITJohn
Leonard, MITSeth Teller, MIT http//cgr.csail.mit
.edu
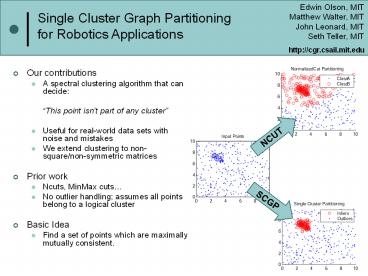
Single Cluster Graph Partitioningfor Robotics
Applications
- Our contributions
- A spectral clustering algorithm that can decide
- This point isnt part of any cluster
- Useful for real-world data sets with noise and
mistakes - We extend clustering to non-square/non-symmetric
matrices - Prior work
- Ncuts, MinMax cuts
- No outlier handling assumes all points belong to
a logical cluster - Basic Idea
- Find a set of points which are maximally mutually
consistent.
NCUT
SCGP
2
Edwin Olson, MITMatthew Walter, MITJohn
Leonard, MITSeth Teller, MIT http//cgr.csail.mit
.edu
Single Cluster Graph Partitioningfor Robotics
Applications
- Outlier Rejection
- Inputs Noisy measurements
- Outputs Inliers
- Data Association
- Inputs data-association hypotheses
- Outputs self-consistent data-association
hypotheses - Feature Detection/Estimation
- Inputs points and proposed models
- Outputs self-consistent points and models
- Lower error and faster than RANSAC
Multi-track sonar range data
No Outlier Rejection
Outlier Rejection (SCGP)
Observations
Map
Data Associations
Line detection and extraction
Recommended
