
Rep PowerPoint PPT Presentation
Title: Rep
1
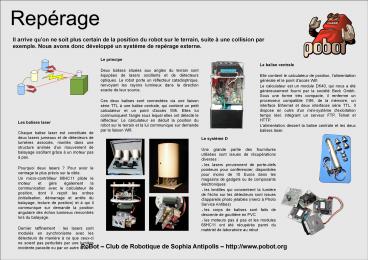
Repérage
Il arrive qu'on ne soit plus certain de la
position du robot sur le terrain, suite à une
collision par exemple. Nous avons donc développé
un système de repérage externe.
Le principe Deux balises situées aux angles du
terrain sont équipées de lasers oscillants et de
détecteurs optiques. Le robot porte un réflecteur
catadioptrique, renvoyant les rayons lumineux
dans la direction exacte de leur source. Ces
deux balises sont connectées via une liaison
série TTL à une balise centrale, qui contient un
petit calculateur et un point d'accès Wifi. Elles
lui communiquent l'angle sous lequel elles ont
détecté le réflecteur. Le calculateur en déduit
la position du robot sur le terrain et la lui
communique sur demande par la liaison Wifi.
La balise centrale Elle contient le calculateur
de position, l'alimentation générale et le point
d'accès Wifi. Le calculateur est un module DK40,
qui nous a été généreusement fourni par la
société Beck Gmbh. Sous une forme très compacte,
il renferme un processeur compatible I186, de la
mémoire, un interface Ethernet et deux interfaces
série TTL. Il dispose en outre d'un mini-système
d'exloitation temps réel, intégrant un serveur
FTP, Telnet et HTTP. L'alimentation dessert la
balise centrale et les deux balises laser.
Les balises laser Chaque balise laser est
constituée de deux lasers jumeaux et de
détecteurs de lumières associés, montés dans une
structure animée d'un mouvement de balayage
oscillant grâce à un moteur pas à pas. Pourquoi
deux lasers ? Pour avoir le centrage le plus
précis sur la cible. Un micro-contrôlleur 68HC11
pilote le moteur et gère également la
communication avec le calculateur de position,
dont il reçoit les ordres (initialisation,
démarrage et arrête du balayage, lecture de
position) et à qui il communique sur demande la
position angulaire des échos lumineux rencontrés
lors du balayage. Dernier raffinement les
lasers sont modulés en synchronisme avec les
détecteurs de manière à ce que ceux-ci ne soient
pas perturbés par une lumière incidente parasite
ou par un autre laser.
- Le système D
- Une grande partie des fournitures utilisées sont
issues de récupérations diverses - les lasers proviennent de porte-clefs pointeurs
pour conférencier, disponibles pour moins de 10
Euros dans les magasins de gadgets ou de
composants électroniques - les lentilles qui concentrent la lumière de
l'écho sur les détecteurs sont issues d'appareils
photo jetables (merci à Photo Service Antibes) - les corps de balises sont faits de descente de
gouttière en PVC - les moteurs pas à pas et les modules 68HC11 ont
été récupérés parmi du matériel de laboratoire au
rebut
Recommended
