
Animation Speed PowerPoint PPT Presentation
1 / 96
Title: Animation Speed
1
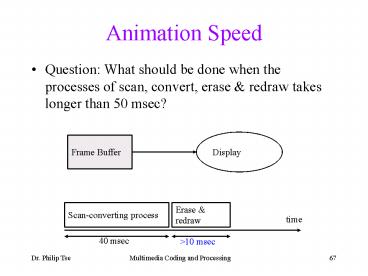
Animation Speed
- Question What should be done when the processes
of scan, convert, erase redraw takes longer
than 50 msec?
Display
Frame Buffer
Scan-converting process
Erase redraw
time
40 msec
gt10 msec
2
Use Double Buffering
- Frame buffer is divided into two images. Each
with half bits per pixel of the overall frame
buffer
1st half
Erase redraw
Scan-converting
2nd half
Scan-converting
Erase redraw
time
25 msec
25 msec
25 msec
3
Course Progress
- Introduction
- Data Representation
- Processing Techniques
4
Data Representation
- Number and text
- Graphics and animations
- Sound and Audio
- Images Representation
- Video Representation
5
Sound and Audio
- Sound Concept How is analog sound represented in
digital data? - Human Auditory System
- Digitization of sound waves
- Standard Sound and Audio formats
6
Sound and Audio
- Sound wave is a longitudinal wave of air
pressure. - Unlike Electromagnetic waves, the change in air
pressure is in the same direction as the
propagation of the sound.
time
7
Sound and Audio
- An audio sound wave is characterised by the pitch
and loudness. - Sound wave can be represented by a waveform with
frequency and amplitude s.t. - Frequency measures pitch
- Amplitude measures loudness
time
8
Amplitude
- Dynamic Range is the difference between the
quietest and the loudest sound. - Amplitude measures the loudness of the sound
Amplitude
time
0 1 2 3 4 5 6
7 8 9 10 11 12
9
Amplitude
- Amplitude is measured in units of deciBel (dB).
- Low background noise
- Normal speaking
- High uncomfortable to ears (gt80dB)
- X units in Y dB means
- Y 20 log10X
Amplitude
time
0 1 2 3 4 5 6
7 8 9 10 11 12
10
Wavelength
- Air pressure of sound waves oscillates in cycles.
- Wavelength is the length of a cycle period of a
waveform. - Wavelengths can be measured in seconds or
milliseconds.
wavelength
time
0 1 2 3 4 5 6
7 8 9 10 11 12
11
Frequency
- Frequency 1/wavelength
- Frequency in Hertz (Hz) 1Hz 1/second
- Infra sound 0-20 Hz
- Human hearing 20Hz - 20KHz
- Ultrasound 20KHz 1 GHz
- Hypersound gt1GHz
wavelength
time
0 1 2 3 4 5 6
7 8 9 10 11 12
12
Sound and Audio
- A pure tone is a sine wave.
- Two waves with the same frequency may start at
different time. Phase or phase shift refers to
the relative time delay between two waves.
time
phase
13
Sound and Audio
- Sound waves are additive. In general, the
resultant sound wave is represented by a sum of
sine waves.
time
Component tones
Resultant sound wave
14
Human Auditory System
- Human ear converts sound waves to nerve signals
- Brain neurons recognize the nerve signals
- Human ears can hear
- Frequency range of 20Hz to 20 KHz.
- Dynamic range of 120 dB.
- Ears are uncomfortable above 80dB.
15
Human Auditory System
- Psychoacoustic studies show that we cannot hear
some sound for some psychoacoustics principles - Absolute threshold of hearing
- Critical band frequency
- Simultaneous masking
- Temporal masking
16
Absolute Threshold
- Absolute threshold of hearing is the amount of
energy needed in a pure tone - This threshold depends on the frequency
- The absolute threshold can be approximated by
- in dB SPL, where SPL is the sound pressure
level.
17
Absolute Threshold of Hearing
18
Absolute Threshold
- The lowest point on the curve at around 4kHz.
- Tq(f) may be interpreted as a maximum allowable
energy level for coding distortions introduced in
the frequency domain.
19
Critical Band Frequency
- Frequency-to-place transformation takes place in
the inner ear along the basilar membrane - Each region in the cochlea is attached with a set
of neural receptors - Distinct regions in the cochlea are tuned to
different frequency bands - Critical bandwidth can be loosely defined as the
bandwidth at which subjective responses change
abruptly
20
Critical Band Frequency
- The detection threshold for a narrow-band noise
source between two masking tones remains constant
as long as the frequency separation between the
tones remains within a critical bandwidth. - Beyond the bandwidth, the threshold rapidly
decreases.
21
Critical Band Frequency
Sound Pressure Level (dB)
Audibility Threshold (dB)
?f
masking sources
Freq.
?f
Critical bandwidth
measured sources
22
Simultaneous Masking
- Simultaneous Masking (SM)
- one sound is rendered inaudible because of the
presence of another sound - Presence of a strong masker creates an excitation
of sufficient strength on the basilar membrane at
the critical band location to block transmission
of a weaker signal effectively - Spread of Masking
- A masker centered with one critical band may
affect the detection thresholds in other critical
bands.
23
Simultaneous Masking
- 2 types of simultaneous masking depending on the
relative strength of the tone and noise - Tone-masking noise
- Noise-masking tone
- Noise-masking threshold is given by
- THN ET 14.5 B
- where ET is energy level of critical band
tone-masker and B is the critical band number.
24
Simultaneous Masking
- Tone-masking threshold is given by
- THT EN K
- where EN is energy level of critical band
noise-masker and K is typically between 3 and 5
dB. - Masking thresholds are functions of Just
Noticeable Distortion (JND).
25
Temporal Masking
- Absolute audibility thresholds for masked sounds
are increased prior to, during, and following the
occurrence of a masking signal. - A listener will not perceive signals beneath the
elevated audibility thresholds produced by abrupt
signal transients. - Thus, abrupt signal transients create pre-masking
and post-masking regions for a time period.
26
Temporal Masking
Masked Audibility Threshold Increase
Simultaneous masking
Post-masking
Pre-masking
50
100
0
50
150
200
-50
0
Time after masker appear(ms)
Time after masker removal (ms)
27
Temporal Masking
- Pre-masking tends to last only about 5ms.
- Post-masking will extend from 50 to 300ms,
depending upon the strength and duration of the
masker. - Temporal masking has been used in audio-coding
algorithms. - Pre-masking has been exploited in conjunction
with adaptive block-size transform coding to
compensate for pre-echo distortions.
28
Sound Representation
- The analog sound wave is a one dimensional wave
of air pressure. - Mathematically, the digital sound wave is
represented as a one dimensional digital waveform
in computers. - The amplitude of the waveform is the measured air
pressure of the sound wave.
time
0 1 2 3 4 5 6
7 8 9 10 11 12
29
Digitization of Sound
- A microphone receives the sound waves and
converts the sound waves into electronic signals
in the analog waveforms. - An A/D converter performs the analog-to-digital
signal conversion to changes the analog signals
into digital signals. - Computers can store, transmit, and process the
digital signals. - A D/A converter performs the digital-to-analog
signal conversion. - The speakers converts the electronic signals into
sound waves.
30
Digitization of Sound
A/D Converter
1001
D/A Converter
1001
31
Digitization of Sound Wave
- A/D converter takes samples of the amplitude of
the analog signals at different time positions. - The number of samples per second, called the
sampling rate, is fixed.
time
0 1 2 3 4 5 6
7 8 9 10 11 12
Time for 1 sample
32
Amplitude
- The sample values can be encoded with more or
less bits. More bits can describe the amplitude
in finer details. - 8 bit quality ? 256 different values
- 16-bit quality ? 65,536 different values
- The sampled values are then encoded in a format,
such as Pulse Code Modulation. PCM uses fixed
length for each frequency sample.
33
Encoding Formats
- Pulse Code Modulation (PCM) digital
representation of analog signal where the
magnitude of the signal is sampled regularly at
uniform intervals and then quantized to a series
of symbols in a binary code - Differential PCM record the differences between
samples instead of the sample values - Adaptive Differential PCM record differences
between samples and adjust the coding scales
dynamically.
34
Standard Audio/Sound Formats
- Telephone quality speech input
- Mono-channel
- 8,000 samples/second, 8 bits/sample
- CD quality stereo audio
- 2 stereo channels (left right)
- 44,100 samples/second, 16 bits /sample
35
Standard Audio/Sound Formats
- DVD quality audio
- Mono(1.0), stereo(2.0), Quad(4.0) or
surround(5.1) channels - 5.1 channels Left, Right, Centre, Left Rear,
Right Rear, subwoofer - 16, 20, or 24 bits per sample
- 44.1kHz, 48kHz, 88.2kHz, or 96kHz
- PCM format
- Max bit rate 9.6 Mbps
36
Standard Audio/Sound Formats
- MIDI (Musical Instrument Digital Interface)
- Digital encoding of musical information
- The sound data is not used. Only the commands,
music scores, that describe how the music should
be played are used. - Highest compression, easy for editing
- Requires a music synthesizer to generate music
37
Course Progress
- Introduction
- Data Representation
- Number and text
- Graphics and animations
- Sound and Audio
- Images Representation
- Video Representation
- Processing Techniques
38
Course Progress
- Image Representation
- Light and Colour
- Human vision system
- Image capture
- Image quality measurements
- Image resolution
- Connectivity and distance
- Colour representation models
- Camera calibration
39
Light and Colour
- Light
- Electromagnetic Wave
- Wavelength 380 to 780 nanometers (nm)
- Colour
- Depend on spectral content (wavelength
composition) - E.g. Energy concentrated near 700 nm appears red.
- Spectral colour is light with a very narrow
bandwidth. - A white light is achromatic.
40
Colour
- Two types of light sources
- Illuminating light source
- Reflective light source
41
Colour
- Illuminating light source generates
- Light of certain wavelength, or
- Light of a wide range of wavelength
- Follow additive rule
- Colour of the mixed light depends on the SUM of
the spectra of all the light sources
42
Colour
- Examples of illuminating light sources of wide
wavelengths - Sun, stars
- Light bulb, florescent tube
- Examples of illuminating light sources of narrow
wavelength - Halogen lamp, Light power light bulb
- Phospher, Light Emitting Diode
43
Colour
- Reflecting light
- Object absorbs incident light of some wavelengths
- Object reflects incident light of remaining
wavelengths - E.g. An object that absorbs wavelengths other
than red would appear red in colour - Follow subtractive rule colour of the mixed
reflecting light sources depends on the remaining
unabsorbed wavelengths
44
Colour
- Examples of reflecting light source
- Mirror and white objects reflects all wavelengths
of light regularly - Most solid objects
- E.g. Dye, photos, the moon
45
Colour
- Complements of colours
- Red ? Cyan
- Green ? Magenta
- Blue ? Yellow
46
Human Vision System
- Schematic diagram of a human eye
Circular muscle
Lens
Fovea
Optic nerve
Cornea
Retina
Iris
47
Human Vision System
- Each part of our eye has some functions
- Iris controls the intensity of light entering the
eye - Circular muscle controls the thickness of the
lens - Lens refracts the light onto the fovea
- Optic nerve transmits light signals to the brain
- Brain
- interprets the light signals from both eyes
- understands the signals as an image
48
Human Vision System
- Path of light in the human eye
- Enters eye through cornea
- Passes through hole within iris
- Refracted by the lens
- Hits the retina wall inside the eye
- Excites some light-sensitive cells
49
Human Vision System
- Path of visible light inside a human eye
Circular muscle
Lens
Fovea
Optic nerve
Cornea
Retina
Iris
50
Human Vision System
- 2 types of light-sensitive cells
- Cones and rods due to their shapes
- Rods
- Very sensitive to intensity of light
- Generates monochromatic response
- More sensitive in low light level than cones
- Distributed across the retina wall
- See grey images under dim light at night
51
Human Vision System
- Cones
- red cone, green cone, and blue cone
- Each type of cone is sensitive to light of
different wavelength - Densely populated at the fovea. Approx. 160,000
cones per mm2 - Size of cones 1µm across an angle of 20 seconds
of arc - Smallest readable object 0.2mm at 1m far
52
Human Vision System
- We can distinguish only 40 shades of brightness
- Our brightness sense adapts as we scan over an
image - Most colours could be matched by mixing different
portions of a red, a green, and a blue primary
source.
53
Image Capture
- Images may be captured using
- Cameras
- Video cameras
- Fax machines
- Ultrasound scanners
- Radio telescopes
- An image is formed by the capture of radiant
energy that has been reflected from surfaces that
are viewed
54
Image Capture
- The amount of reflected energy, f(x,y), is
determined by two functions - The amount of light falling on a scene, i(x,y)
- The reflectivity of the various surfaces in the
scene, r(x,y) - These two functions combine to get f(x,y)
i(x,y) r(x,y)
55
Image Capture
- The range is practically bounded by the hardware
resolution. It is calibrated to 0 for black and
to 255 for white. Intermediate values are
different intensity of grey.
56
Image Capture
Red sensor
Green sensor
Blue sensor
A colour image is formed by combining the 3
images captured by the red, blue, and green
sensors.
57
Cameras
- 3 main types of camera
- Vidicons, charge coupled devices (CCDs), and
Complementary Metal Oxide Silicon (CMOS). - Vidicons
- Image is formed on a screen.
- The screen is scanned across to produce
continuous voltage signal which is proportional
to the light intensity of image.
58
Cameras
- CCD sensors
- A 2D array of pixel photosensitive sensors
- The number of charge sites gives the resolution
of the CCD sensor - Each sensor generates charges proportional to the
incident light intensity. - Each column of sensors is emptied into a vertical
transport register (VTR). - The VTRs are emptied pixel by pixel into a
horizontal transport register (HTR). - HTR empties the information row by row into a
signal unit
59
Cameras
- CMOS sensors
- A 2D array of lattice
- Charge incident on a site is proportional to the
brightness at a point - Charge is then read like computer memory
- A particular site is selected by the control
circuit and the content of the site is read - The number of charge sites gives the resolution
of the CCD sensor
60
Comparison of Camera Sensors
- Vidicon
- ? Cheap
- ? Aging problem due to moving parts
- ? Delay in response to moving objects in a scene
- CCD
- ? Irregularity in charge sitess material
(silicon) - ? Blooming effect because size is limited to 4 µm
- CMOS
- ? Irregular in charge sitess material (silicon)
- ? Directly related to intelligent cameras with
on-board processing - ? Cheaper than CCD
- ? Small size at around 0.1 µm
61
Image Quality Measurements
- Image measurements processes include
- Imaging devices focus radiant energy onto a
photosensitive detector - The quantity of energy being absorbed is measured
digitally - The measurements are assembled into an image
- All these processes are subject to inaccuracies
gt images are not strictly accurate.
62
Source of degradation
- Refraction of light at lens
- Distortion by camera lens
- Scattering of light by transmission medium in the
light path - Imperfect detector
- Blooming effect
63
Refraction
- Lens are made of glass that refracts light
- The amount of refraction depends on the
wavelength of the light - A ray of white light is split into the
constituent colours.
64
Refraction
- An optical system, based on lenses, cannot focus
light from a point onto a fixed point. - ? White objects have a coloured fringe.
- ? Sharp boundaries are blurred
65
Geometric Distortion
- The best focus of scene is on a spherical surface
behind the lens - It is difficult, if not impossible, to fabricate
spherical detectors - Image projected onto a planar detector
- Severe distortion when focal length of lens is
short
66
Geometric Distortion
- Image of rectangular grid captured using a short
focal length lens
67
Scattering
- Light rays are dispersed by materials between the
reflected surface and the detector - E.g. fog disperse light
68
Imperfect Detector
- Sensitivity of detector is not uniform
- Noise in the electronics that converts radiant
energy to an electrical signal - Usually quoted by camera manufacturers
- Overflow or clipping of signals when the signal
is of excessive amplitude. - The signal amplitude overflows the max value
- The signal amplitude might be clipped
- The detector is calibrated at each pixel
69
Imperfect Detector
- Underexposure image lose image details
70
Imperfect Detector
- Underexposure image lose image details
71
Electronic Noise
- Noise is defined as deviation of the signal from
its expected value - Electronic noise produces speckle effect
- Two types of speckle effect
- Salt and pepper noise Random white and black
noise on image - Gaussian noise Random noise superimposed on the
signal being captured
72
Salt and Pepper Noise
73
Blooming effect
- A bright point source of light
- Cameras optical system will blur image slightly
- Neighbouring cells in the detector will respond
to this received impulse - ? Inaccurate brightness at neighbouring pixels
- ? when auto exposure is used, image details are
lost in other under-illuminated regions
74
Blooming effect
Grey value
Pixel position
original grey value
Pixel position
75
Image Quality Measurement
- Objective measurements
- Measured by instruments
- Invariant to the change of subjects
- Peak Signal to Noise Ratio (PSNR)
- Subjective measurements
- Measured by human beings
- Variant to the change of subjects
- Human survey
76
Signal-to-Noise Ratio
- Signal-to-Noise Ratio (SNR) is the ratio of the
signal to the noise - It is often measured in decibels (dB) as
77
Signal-to-Noise Ratio
- The Peak Signal-to-Noise Ratio (PSNR) is often
considered. Thus, the ratio of the maximum value
of the signal to the measured noise amplitude (in
dB).
78
Image Resolution
- 3 resolutions
- Spatial resolution (no. of pixels)
- Brightness (no. of greylevels)
- Temporal (number of frames per second)
- These resolutions do have a mutual dependency
79
Spatial Resolution
- An image is represented as a two-dimension array
of sample points called pixels. - E.g. A 320 x 200 image has 320 pixels on each
horizontal line and 200 pixels on each vertical
line.
320
x x x x x x x x x x x x x x x x x x x x x x x x x
x x x x x x x x x x x x x x x x x x x x x x x x x
x x x x x x x x x x x x x x x x x x x x x x x x x
x x x x x x x x x x x x x x x x x x x x x x x x x
x x x x x x x x x x x x x x x x x x x x x x x x x
x x x x x x x x
pixel
200
80
Spatial Resolution
- A simple definition of spatial resolutions
- spatial resolution h v
- where h no. of horizontal pixels and v no.
of vertical pixels.
81
Spatial Resolution
- Field of view, ?v the angle subtended by rays
of light that hit the detector at the edge of the
image - Relationship between field of view, the camera
detector, and focal length, f.
h
?v
v
f
82
Spatial Resolution
- Horizontal Angular Resolution (HAR) is the ratio
of horizontal field of view, ?h, divided by the
number of pixels across the image - Vertical Angular Resolution (VAR) is the ratio of
vertical field of view, ?v, divided by the number
of pixels of the image vertically
83
Spatial Resolution
- Usually, HAR VAR by design
- r the smallest resolvable object
- Z the distance from the camera
- ? the angular resolution in radians
84
Spatial Resolution
- To resolve an object 2mm in diameter at a range
of 1m, the minimum angular resolution, ?, needs
to be - ? 2mm/1m
- 0.002 radian
- 0.1146 degree.
85
Spatial Resolution
- According to Nyquist theorem, at least two
samples per period are needed to represent a
periodic signal unambiguously, - Applying the Nyquist theorem to the spatial
dimension, two pixels must span the smallest
dimension of an object in order for it to be seen
in the image.
86
Spatial Resolution
- Lena images with different sample points 256x256
and 512x512 pixels
87
Spatial Resolution
- When a fixed size displaying window shows an
image of varying resolution - Low resolution image loses details
- High resolution image shows details
Low resolution
High resolution
88
Brightness Resolution
- For monochrome image,
- Brightness resolution Number of grey levels
- Our eyes can differentiate around 40 shades of
grey only - Image capture devices are limited in
differentiating number of grey levels - Most monochrome images are captured using 8 bit
values. Range of grey levels is 0, 255.
89
Brightness Resolution
- Images with more shades of grey show more details
bw
8 bit grey
90
Colour Resolution
- For colour images, a display device may use fewer
colours - Colour resolution number of distinguishable
colours - Colour images are captured using three eight bit
values.
91
Colour Resolution
- Images with more colours show image with high
fidelity
24 bit colour
8 bit colour
92
Image Bits per Pixel
- 1 bit/pixel black white image, facsimile image
- 4 bits/pixel computer graphics
- 8 bits/pixel greyscale image
- 16 or 24 bits/pixel colour images
- colour representations RGB, HSV, YUV, YCbCr
93
Interactions
- Spatial and brightness resolution can interact in
affecting the overall perception of an image - Poor spatial resolution may be compensated for by
a good brightness resolution - For each brightness resolution, a threshold
spatial resolution can be defined. Images with
higher spatial resolution are acceptable whereas
images with lower spatial resolution are
unacceptable.
94
Interaction
8 bit greyscale
50x50
25x25
100x100
200x200
95
Interaction
8 bit 256 colours
25x25
50x50
100x100
200x200
96
Interaction
24 bit colour
25x25
50x50
100x100
200x200
Recommended
