
Serial and Parallel Manipulators - PowerPoint PPT Presentation
1 / 11
Title:
Serial and Parallel Manipulators
Description:
The most common joint types are: revolute link (rotation around a fixed axis) ... Homogeneous coordinates: embed 3D vectors into 4D by adding a '1' ... – PowerPoint PPT presentation
Number of Views:1091
Avg rating:3.0/5.0
Title: Serial and Parallel Manipulators
1
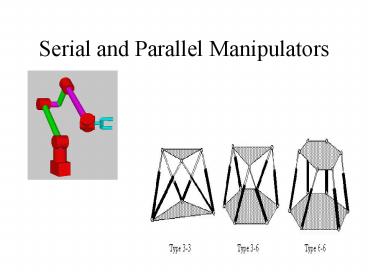
Serial and Parallel Manipulators
2
Serial and Parallel Manipulators
PUMA560
Hexapod
3
Links and Joints
End Effector
Robot Basis
4
Joints.
- Joints connect parts of manipulators.
- The most common joint types are
- revolute link (rotation around a fixed axis)
- prismatic link (linear movement)
- These joints provide the DOF for an effector.
5
Homogeneous Coordinates
- Homogeneous coordinates embed 3D vectors into 4D
by adding a 1 - More generally, the transformation matrix T has
the form
6
Link Length and Twist
ai-1
?i-1
7
Link Transformation
?i
8
Denavit-Hartenberg Parameters
Axis i
between Xi-1 to Xi
?i
Link i
di
distance along Zi
distance along Xi-1
between Zi-1 to Zi
9
Direct Kinematics
Direct Kinematics HERE!
10
DK Algorithm
- 1) Draw sketch
- 2) Number links. Base0, Last link n
- 3) Identify and number robot joints
- 4) Draw axis Zi for joint i
- 5) Determine joint length ai-1 between Zi-1 and
Zi - 6) Draw axis Xi-1
- 7) Determine joint twist ?i-1 measured around
Xi-1 - 8) Determine the joint offset di
- 9) Determine joint angle ?i around Zi
- 1011) Write link transformation and concatenate
11
Inverse Kinematics
How do I put my hand here?
IK Choose these angles!
12
One of many problems There may be multiple
solutions
Elbow down - Elbow up
Recommended
CrystalGraphics Presentations





























