
Hybrid Controller PowerPoint PPT Presentation
1 / 1
Title: Hybrid Controller
1
Pannag Sanketi,Tomoyuki Kaga, Carlos Zavala, Karl
Hedrick
Automotive Engine Hybrid Modeling
http//chess.eecs.berkeley.edu
Abstract Automotive Engine models can be broadly
classified into three types mean value, event
based and finite-element based models. Their
differences lie mainly in the degree of details
in the system description. With the objective of
acquiring a deeper understanding of the influence
of the events taking place in the engine during
the initial seconds of operation, a hybrid model
was developed. The results of the simulation of
the hybrid plant operating together with a mean
value controller are presented. A hybrid
controller, directed towards solving the
conflicting objectives of reducing the HC
(hydrocarbon) emissions and lighting off the
catalysts as fast as possible, is also developed.
The simulation results of the controller
operation are also presented. Reachability as a
tool for stability analysis is explored using a
simplified version of the engine model with the
aid of the LevelSet Toolbox developed by Ian
Mitchell. The advantages and disadvantages of a
hybrid model are discussed.
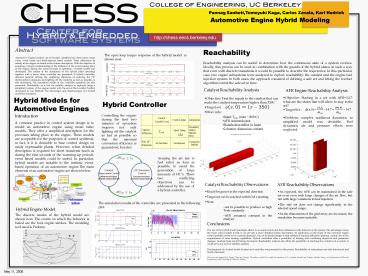
Reachability Reachability analysis can be useful
to determine how the continuous state of a system
evolves. Ideally, this process can be used in
combination with the guards of the hybrid states,
in such a way that even with discrete transitions
it would be possible to describe the
trajectories. In this particular case, two engine
subsystems were analyzed to explore reachability
the catalyst and the engine fuel injection
system. In both cases, the approach consisted of
defining a safe set and letting the levelset
algorithm extend the safe set in time.
The open loop torque response of the hybrid model
is shown next.
Catalyst Reachability Analysis
AFR Engine Reachability Analysis
Hybrid Models for Automotive Engines
Hybrid Controller
Controlling the engine during the first two
minutes of operation requires not only lighting
off the catalyst as fast as possible so that the
maximal conversion efficiency is guaranteed, but
also
Introduction A common practice in control system
design is to model an automotive engine using
mean value models. They offer a simplified
description for the processes taking place in the
engine. These models are acceptable for the
purposes of control synthesis, in fact, it it is
desirable to base control design on easily
expressable plants. However, when detailed
description is required for short transients
(such as during the first seconds of the
warming-up period), event based models could be
useful. In particular, hybrid models are suitable
to the intrinsic event-based operation of an
automotive engine.The main elements of an
automotive engine are shown below.
keeping the afr (air to fuel ratio) as lean as
possible, to avoid the generation of large
amounts of HCs. These two conflicting objectives
can be addressed by the use of a hybrid
controller.
Catalyst Reachability Observations
AFR Reachability Observations
- As expected, the AFR can be maintained in the
safe set even even with large changes of the air
flow, but not with large variations in fuel
injection. - The safe set does not change significantly in the
selected speed range. - As the dimensions of the grid array are
increased, the simulation becomes unstable.
- Reach Set grows in the expected direction
- Target set can be reached within 2.8 s starting.
- Note
- not be possible to produce so high Texh
constantly - AFR assumed constant in the analysis
The simulation results of the controller are
presented in the following plot.
Hybrid Engine Model
The discrete modes of the hybrid model are shown
next. The events on which the behavior is based
are the four engine strokes. The modeling tool
used is Ptolemy.
Conclusions The use of the hybrid model paradigm
allows to accounts events and their influences in
the behavior of the system. The advantage versus
the mean value models is that it can provide a
more detailed system description. Its application
in the study of the cold-start engine control
problem seems to be a natural approach. One of
its disadvantages is that validation remains
difficult to perform, mainly due to the
requirements of extra sensing capabilities.
Hybrid controllers offer a possibility of dealing
with conflicting objectives and parameter
changes. Analysis tools are still being
developed. Reachability analysis also offers the
possibility of studying the evolution of a
system. It could serve as a tool for stability
analysis. Development of a hybrid model of
plant and controller was presented in this
poster. Reachability of subsystems was also
introduced and briefly discussed. This work was
supported by Toyota, Chess and Conacyt. The
authors would like to thank the assistance of Dr.
Jonathan Sprinkle and Professor Shankar Sastry,
in the department of Electrical Engineering, at
the University of California, Berkeley.
May 11, 2005
Recommended
