
Compass Rose PowerPoint PPT Presentation
1 / 4
Title: Compass Rose
1
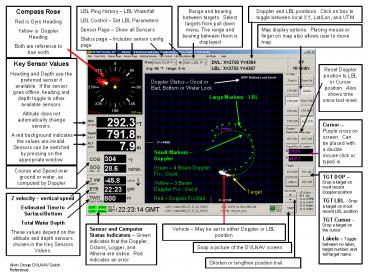
Compass Rose Red is Gyro Heading Yellow is
Doppler Heading Both are reference to true north
Doppler and LBL positions. Click on box to
toggle between local XY, Lat/Lon, and UTM
Range and bearing between targets. Select
targets from pull down menu. The range and
bearing between them is displayed
LBL Ping History LBL Waterfall LBL Control
Set LBL Parameters Sensor Page Show all
Sensors Status page Includes sensor config page
Map display options. Placing mouse or finger on
map also allows user to move map.
Key Sensor Values Heading and Depth use the
preferred sensor if available. If the sensor
goes offline, heading and depth toggle to other
available sensors. Altitude does not
automatically change sensors. A red background
indicates the values are invalid. Sensors can be
switched by pressing on the appropriate window.
Reset Doppler position to LBL or Cursor position.
Also shows time since last reset.
Doppler Status Good or Bad Bottom or Water Lock
Large Markers - LBL
Cursor Purple cross on screen. Can be placed
with a double mouse click or typed in.
Small Markers Doppler Green 4 Beam Doppler
Fix - Good Yellow 3 Beam Doppler Fix -
Good Red Doppler Fix Bad
Course and Speed over ground or water, as
computed by Doppler
TGT DOP Drop a target on most recent Doppler
position TGT LBL - Drop a target on most recent
LBL position TGT Cursor - Drop a target on the
cursor Labels Toggle between no label, target
number, and full target name.
Target
Z velocity vertical speed Estimated Time to
Surface/Bottom Total Water Depth These values
depend on the altitude and depth sensors chosen
in the Key Sensors Values.
Sensor and Computer Status Indicators Green
indicates that the Doppler, Octans, Logger, and
Athena are online. Red indicates an error.
Vehicle May be set to either Doppler or LBL
position
Snap a picture of the DVLNAV screen
Shorten or lengthen position trail
Alvin Group DVLNAV Quick Reference
2
LBL Control Page LBL Parameters are set here.
Opened by clicking on the LBL Control option on
the menu bar.
Current LBL Configuration Transponders used,
baseline side, solution status, time since last
position
Select Baseline to be used.
Transponder Selection Select A lists the
available transponders and their parameters
(Return frequency, XYZ position). Select B,
Select C, Select D are used to designate the
other transponders in the net.
Choose baseline side
3
Sensor status page opened by pressing the
Sensor Page on the menu bar. Black values
indicate a reliable measurement, while red
indicates a poor measurement. This page displays
all sensors used by DVLNAV, except for LBL
Navigation.
Attitude Sensors Octans Doppler Crossbow (Jason)
Course over ground and water from Doppler.
Depth and Altitude measurements Paros 1 and 2,
Altimeter, Doppler.
- This page is helpful for seeing which sensors
are running and also to compare sensor values. - With the exception of altitude and manual depth,
any sensor value with a red background will not
be used by DVLNAV.
4
Sensor Configuration Page Opened with the
status page option on the menu bar. If another
panel opens instead of this one, simply chose the
Sensor Configuration tab in the far right column.
Preferred heading, depth, and altitude sensors
are selected here (in addition to being able to
toggle through them by clicking on their
respective windows in the main DVLNAV window).
Various compensations little need to adjust
these
Select preferred Heading sensor
Select preferred Depth sensor a manual depth
may be entered here.
Select preferred Sound Velocity Source - a
manual values may be entered here.
Select preferred Altitude source Remember the
Estimated Altitude is exactly that!
Set position trail length by the arrows or
manually
Recommended
