
Example: Navy UAV Concept - PowerPoint PPT Presentation
1 / 9
Title:
Example: Navy UAV Concept
Description:
Video Distribution Process. VIDEO DISTRIBUTION HOST. Contract. Resource. Manager ... VIDEO DISPLAY HOST 1. Contract. Output Rate. Control (TBD) Other parameter ... – PowerPoint PPT presentation
Number of Views:233
Avg rating:3.0/5.0
Title: Example: Navy UAV Concept
1
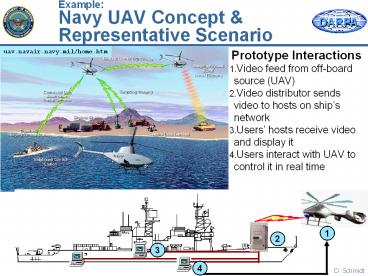
ExampleNavy UAV Concept Representative
Scenario
Prototype Interactions
- Video feed from off-board source (UAV)
- Video distributor sends video to hosts on ships
network - Users hosts receive video and display it
- Users interact with UAV to control it in real time
2
QuO/HIPER-D Integration Architecture
Video Display Process
Video Acceptor Process
Video
Video Distribution Process
Source
Instrumentation
Process
Video
Forwarding
Video
Code
Forwarding
Code
Output
Other parameter
Output Rate
Input Queue
CPU load
Rate
(TBD)
UAV Priority
Control
Size
Control
Output Queue
Contract
Size
Contract
UAV
VIDEO DISPLAY HOST 1
Video
Instrumentation
Other parameters
File
(TBD)
Adaptive Control Process
UAV
SIMULATION
Host Monitor Process
HOST
VIDEO DISPLAY HOST N
CPU load
Host
Monitor
Code
Net load
Resource
Instrumentation
Manager
VIDEO DISTRIBUTION HOST
Distributor
3
Current Adaptation responses
Variations in Mission Requirements
- NETWORK RESERVATION
- Under excessive Network load - Use IntServ to
reserve bandwidth
- LOAD BALANCING
- Excessive CPU load - Move distributor to more
lightly loaded host
- Timeliness
- Pilot or targeting officer must have an
out-of-the-window view of UAV imagery
- Quantity
- Surveillance officer must record complete UAV
imagery for off-line analysis
Variations in Operating Conditions
- DATA FILTERING
- Excessive network or CPU load - Drop selective
frames
4
Layers of QoS Specification Adaptation in UAV
Systems
Emerging Alternatives
Candidate Technologies
Adaptive feedback loops can run at multiple layers
Mission doctrine contracts (TBMD, AAW, CFF)
UAV capabilities
CEC/SIAP
A/V Streaming Service, HiperD RM, Open QoS
Testbed RM, RT ARM, DeSiDeRata, QuO, Proteus
QuO Gateway RT CORBA (ACETAO),
Distributed RT Java
Linux RK
RT Java
Hybrid MultiChannel
IntServ DiffServ
5
Current Layers of QoS Specification Adaptation
in Navy UAV Systems
Video Source
Video Display
Video Forwarding Code
Application or Domain- specific QoS
QoS Adaptive Control
QoS Adaptive Control
A/V Streaming Service
A/V Streaming Service
Operating System QoS
IntServ/RSVP
IntServ/RSVP
Network QoS
6
AdHoc Integration of Components for QoS
Adaptation and Control
Video Source
Video Forwarding Code
Distributed Resource Management Coordination
Control Path
Control Path
Data Path
Data Path
A/V Streaming Service
A/V Streaming Service
Virtual Information Collection
A/V Streaming Service
IntServ/RSVP
IntServ/RSVP
IntServ/RSVP
Operating System
Operating System
Operating System
Wireless Network
LAN Network
7
UAV/HIPER-D Requirements (Previous Experiment)
- Low latency to support interaction (users see
images at the same time as the UAV) - Displayed frame rate can be less than 30/second,
providing that targets remain clear and no jitter - HIPER-D Resource Manager determines where and
when applications run - Management techniques focused on discrete problem
and remedy - New experiments will extend these basic ideas
- Individual and composite bottleneck
identification and adaptations - End-to-end behavior
- Aggregate and Coordinated behavior
- Scaling and Redundancy
- Varied anomalies and operating conditions
- More resources under control/coordination,
including soft resources - Intercluster coordination and feedback
8
UAV demonstration illustrates some of the
software engineering challenges with reusing and
adding QoSto current off-the-shelf component
software
- We used an off-the-shelf video player in the UAV
demonstration - Developed for playing MPEG video from a file
- Had to convert it to accept input from a stream
- Developers of the video player had recognized the
need for adaptation to handle changes in QoS - The video player included code to compensate for
slow video cards (i.e., falling behind in the
video) - Unfortunately, this code is intertwined
throughout the functional code (i.e., there is no
separation of concerns) - Reusing this code presented some challenges
because the QoS code was intertwined and specific
to a different use-case - We had to turn off the file-specific adaptation
in order to use the video player effectively with
a video stream - This was difficult because the adaptive code was
intertwined throughout the functional code - In contrast, the adaptive code specified
separately in the QuO middleware was easy to
change
9
Applying Reflection to Optimize Multi-level
Resource Management
Applying reflection as an optimization is even
more relevant to middleware than compilers due to
dynamism global resources
- Key System Characteristics
- Integrate observing predicting of current
status delivered QoS to inform the meta-layer - Meta-layer applies reflection to adapt system
policies mechanisms to enhance delivered QoS
Client
Object
Collect
ORB endsystem
ORB endsystem
10
Key Research ChallengeProviding Organizing
QoS Guarantees for Multiple Adaptive Feedback
Loops
Solution Approach
- Multi-level distributed resource management
middleware - Support stable QoS at varying granularity scope
levels for integrated, multi-property feedback
paths across different locations time scales - Patterns, protocols, architectures needed to
integrate COTS components
11
Integrated Adaptive System Concept
Application or Domain-specific QoS
Common Middleware Services QoS
Distribution Middleware QoS
Operating System QoS
Network QoS
12
Fundamental Research Challenges Addressed by UAV
Demo Scenario
- Develop, integrate, showcase DARPA technologies
that - Provide time-bound dependability that is (1)
specified declaratively (2) respects
(re)configured battle force (multi)mission
doctrines - Illustrate management control of multiple
resources that ensures system stability in the
presence of adaptivity feedback at multiple
layers - e.g., network adaptivity, application-adaptivity,
end-to-end system adaptivity - Demonstrate the feasibility of pluggable
components adapters that enforce QoS-enabled
services at various layers - Show integrated failure management information
assurance across multiple DARPACOTS technologies - Integrate with advanced NSWC Open QoS Testbed
instrumentation, monitoring, dynamic resource
management capabilities
Recommended
CrystalGraphics Presentations





























