
Edubot Accelerometer Suite PowerPoint PPT Presentation
1 / 1
Title: Edubot Accelerometer Suite
1
Edubot Accelerometer Suite
- Abstract
- Researchers in legged robotic applications
increasingly desire real time body pose knowledge
about the robots they program. Body pose
knowledge enables more efficient and extensive
repertoires of behavior. A variety of methods
have been developed for rigid body pose
estimation, yet none are suited to legged
machines such as the educational robot Edubot.
The implemented approach is a method of
extracting body pose information from multiple
acceleration readings.One accelerometer
measuring acceleration in 3 degrees of freedom
(DOF) enables static body pose estimation. With
this information the Edubot is able to
autonomously maneuver through a channel with
inclined walls. Additional software using the
developed accelerometer suite can yield dynamic
body pose estimation. - Group 8
- Authors
- Elisa Downey-Zayas EE 08
- Hal Paver EE 08
- Advisors
- Dr. Haldun Komsuoglu
- Demo Times
- Thursday, April 24, 2008
- 1030, 1100, 1130 AM
- 130, 230 PM
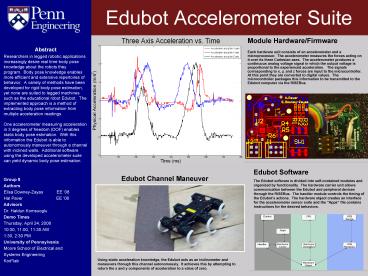
Module Hardware/Firmware Each hardware unit
consists of an accelerometer and a
microprocessor. The accelerometer measures the
forces acting on it over its three Cartesian
axes. The accelerometer produces a continuous
analog voltage signal in which the output voltage
is proportional to the experienced acceleration.
The signals corresponding to x, y, and z forces
are input to the microcontroller. At this point
they are converted to digital values. The
microcontroller packages this information to be
transmitted to the Edubot computer via the
RiSEBus.
Edubot Software The Edubot software is
divided into self-contained modules and organized
by functionality. The hardware carrier unit
allows communication between the Edubot and
peripheral devices through the RiSEBus. The
handler module controls the timing of the
Edubots actions. The hardware object creates an
interface for the accelerometer sensor suite and
the Apps file contains instructions for the
desired behaviors.
Edubot Channel Maneuver
Using static acceleration knowledge, the Edubot
acts as an inclinometer and maneuvers through
this channel autonomously. It achieves this by
attempting to return the x and y components of
acceleration to a value of zero.
Recommended
