
Problem Definition: PowerPoint PPT Presentation
1 / 1
Title: Problem Definition:
1
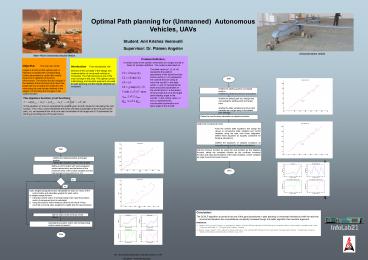
Optimal Path planning for (Unmanned) Autonomous
Vehicles, UAVs
Student Anil Krishna Veeravalli Supervisor Dr.
Plamen Angelov
Unmanned Aerial vehicle
Mars Rover Unmanned Ground Vehicle
- Problem Definition
- A simple model of the position kinematics of a
single aircraft is taken for problem definition.
The model is described as
Objective The main aim of the project is to
find out the optimal path or trajectory including
their corresponding control parameters to control
the vehicle dynamics in obstacle full dynamic
environment. The vehicle should navigate in the
obstacle full environment and reach the target
point by avoiding the obstacles with minimizing
the cost function defined in the aspect of
minimising the changes in the control function.
Introduction From last decade, the demand of the
concepts in the design and implementation of
unmanned vehicles is increasing. The Path
planning is one of the main concept in this area.
The optimal control methodology and heuristic
approach are used for path planning and the
results obtained are compared.
The state vector x1 x2 x3 x4 represents the
position parameters of the aircraft and the
control vector u1 u2 represents the controls
that are using to move the aircraft. In the state
vector x1 and x2 represents the North and East
coordinates of the aircraft and x3 is the speed
of the aircraft and x4 is the target point
heading angle to the aircraft. In the control
vector u1 and u2 represents the commanded
acceleration and bank angle of the aircraft.
The objective function (cost function) In this
equation w1 and w2 represents the weights given
to both values for calculating the cost function.
The x1end, x2end represents the North and east
coordinates of the end point of the path, xnt,
xet represents the north and east coordinates of
the target and t0, tf represents the starting and
ending time of the path travel.
Start
Conclusion The DCNLP algorithm is proved to be
one of the good procedures in path planning of
unmanned vehicles but with the real time
environment situation the computational
complexity increases though it is better
algorithm than heuristic approach. References 1)
Jayesh N. Aminy, Jovan D. Boskovicz, and Raman
K. Mehra, A Fast and Efficient Approach to Path
Planning for Unmanned Vehicles, AIAA Guidance,
Navigation, and Control Conference and Exhibit,
21 - 24 August 2006, Keystone, Colorado. 2)
Brian R. Geiger, Joseph F. Horn, Anthony M.
DeLullo, and Lyle N. Long, Optimal Path Planning
of UAVs Using Direct Collocation with Nonlinear
Programming, American Institute of Aeronautics
and Astronautics conference, Aug., 2006.
Fig. The bounded parameter constraint variation
in UAV navigation Heuristic Approach
Student Anil Krishna Veeravalli, First
Supervisor Dr. Plamen Angelov, Second
Supervisor Dr. Costas Xydeas
Recommended
