
Efficient Discriminative Learning of Parts-based Models - PowerPoint PPT Presentation
Title:
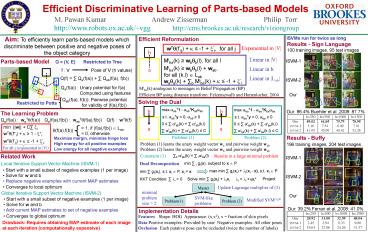
Efficient Discriminative Learning of Parts-based Models
Description:
KKT Condition: i = 0 i = i + xi* Replace negative examples with current MAP estimates Converges to local optimum Master Update Lagrange multiplier of (3) – PowerPoint PPT presentation
Number of Views:27
Avg rating:3.0/5.0
Title: Efficient Discriminative Learning of Parts-based Models
1
Efficient Discriminative Learning of Parts-based
Models
M. Pawan Kumar Andrew Zisserman Philip Torr
http//www.robots.ox.ac.uk/vgg http//cms.brookes.ac.uk/research/visiongroup
Aim To efficiently learn parts-based models
which discriminate between positive and negative
poses of the object category
ISVMs run for twice as long
Efficient Reformulation
Results - Sign Language
Exponential in V
wT?(f-ij) ? -1 ?-i, for all j
100 training images, 95 test images
b
Linear in V
Miba(k) wb?b(l), for all l
Parts-based Model
ISVM-1
a
G (V, E)
Restricted to Tree
Miba(k) wb?b(l) wab, for all (k,l) ? Lab
Linear in h
f V Pose of V (h values)
Linear in Lab
Q(f) ? Qa(f(a)) ? Qab(f(a), f(b))
ISVM-2
wa?a(k) ?b Miba(k) ? -1 ?-i
Qa(f(a)) Unary potential for f(a)
Computed using features
Miba(k) analogous to messages in Belief
Propagation (BP)
Our
Efficient BP using distance transform
Felzenszwalb and Huttenlocher, 2004
Qab(f(a), f(b)) Pairwise potential for
validity of (f(a),f(b))
Solving the Dual
Restricted to Potts
b
b
max ?abT1 - ?abTKab?ab
max ?baT1 - ?baTKba?ba
Our 86.4 Buehler et al.,2008 87.7
The Learning Problem
s.t. ?abTy 0, ?ab 0
s.t. ?baTy 0, ?ba 0
Qa(f(a)) waT?(f(a))
Qa(f(a),f(b)) wabT?(f(a),f(b))
Q(f) wT?(f)
a
a
0 ? ?iab(k) ? ?iab(k,l)
0 ? ?iba(k) ? ?iba(k,l)
min w C? ?i
1, if (f(a),f(b)) ? Lab,
0, otherwise.
?(f(a),f(b))
? ?iab(k) ? ?iab(k,l) C
? ?iba(k) ? ?iba(k,l) C
wT?(fi) ? 1 - ?i
Results - Buffy
Problem (1)
Problem (2)
Maximize margin, minimize hinge loss
wT?(f-ij) ? -1 ?-i
Problem (1) learns the unary weight vector wa and
pairwise weight wab
High energy for all positive examples
196 training images, 204 test images
For all j (exponential in V)
Low energy for all negative examples
Problem (2) learns the unary weight vector wb and
pairwise weight wab
Related Work
?k ?iab(k) ? l?iba(l)
Constraint (3)
Results in a large minimal problem
ISVM-1
Dual Decomposition
min ? i gi(x), subject to x ? P
Local Iterative Support Vector Machine (ISVM-1)
- Start with a small subset of negative examples
(1 per image)
max min ? gi(xi) ?i(xi - x), s.t. xi ? P
min ? gi(xi), s.t. xi ? P, xi x
- Solve for w and b
ISVM-2
Project
Solve min ? gi(xi) ?ixi
KKT Condition ? ?i 0
?i ?i ?xi
- Replace negative examples with current MAP
estimates
- Converges to local optimum
Master
Update Lagrange multiplier of (3)
minimal problem size 2
Global Iterative Support Vector Machine (ISVM-2)
Our
SVM-like problems
- Start with a small subset of negative examples
(1 per image)
Modified SVMLight
Problem(1)
Problem (2)
- Solve for w and b
Our 39.2 Ferrari et al.,2008 41.0
- Add current MAP estimates to set of negative
examples
Implementation Details
- Converges to global optimum
Features
Shape HOG Appearance (x,x2), x fraction of
skin pixels
Data
Positive examples Provided by user Negative
examples All other poses
Drawback Requires obtaining MAP estimate of each
image at each iteration (computationally
expensive)
Occlusion
Each putative pose can be occluded (twice the
number of labels)
Recommended
CrystalGraphics Presentations





























