
3. Applications PowerPoint PPT Presentation
1 / 37
Title: 3. Applications
1
3. Applications
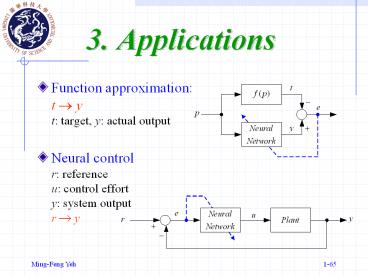
- Function approximation t ? yt target, y
actual output - Neural controlr referenceu control efforty
system output r ? y
2
Neural Control Schemes
- Supervised control
- Hybrid control
- Model reference control
- Internal model control
- Adaptive control
- Reference C.L. Lin H.W. Su, Intelligent
control theory in guidance and control system
design an overview, Proc. Natl. Sci. Counc. ROC
(A), pp. 15-30.
3
Supervisory Control
- Neural network ? inverse NN controller
- The neural controller in the system is utilized
as an inverse system model.
4
Hybrid Control
- Generalized learning (off-line learning)A rough
approximation to the desired control law? Drive
the plant over the operating range and
without instability - Specialized learning (on-line learning)Improve
the control provided by the NN controller
5
Model Reference Control
- Must define its input-output pair r(t), yR(t)
in advance - Attempts to make the plant output y(t) match the
reference model output asymptotically. - The error e(t) is used to adjust the weights of
an neural controller.
6
Internal Model Control
- The NN plant model is first trained off-line to
emulate the controller plant dynamics directly.
During on-line operation, the error is used as a
feedback signal and passed to the NN controller. - The effect of the NN controller is to subtract
the effect of the control signal from the plant
output, i.e., disturbances. - The IMC plays a role as a feedforward controller
and can cancel the influence due to unmeasured
disturbances.
7
Adaptive Control
- The tracking error cost is evaluated according to
some performance index. - The result is then used as a basis for adjusting
the connection weights of the neural networks. - The weights are adjusted on-line using basic
backpropagation rather than off-line.
8
Paper Study 1
- Practical Stability Issues in CMAC Neural Network
Control Systems - Fu-Chuang Chen Chih-Horng Chang
- IEEE Trans. on Control Systems Technology,
- Vol. 4, No. 1, pp. 86-91, 1996
9
Abstract
- CMAC is a practical tool for improving existing
nonlinear control systems. - CMAC can effectively reduce tracking error, but
can also destabilize a control system which is
otherwise stable. - Quantitative studies are presented to search for
the cause of instability in the CMAC control
system.
10
I. Introduction
- CMAC is basically a look-up table method, very
easy to implement, and at the same time it is a
powerful and practical tool for nonlinear
control. - There has been convergence result on the CMAC
learning.
11
Main Purpose of This Paper
- To introduce the CMAC control system from an
industrial point of view. - To describe the unstable phenomenon.
- To quantitatively study how the system parameters
such as control gain, quantization,
generalization, learning rate, etc., are related
to the instability of the system. - To suggest ways to improve system stability.
- To provide some experience evidence.
12
II. CMAC Control System
Use a workable traditional controller to
stabilize the plant and to help the CMAC learn to
provide precise control.
13
Functioning of CMAC
- Initially the CMAC table is empty.
- In each time step k, the CMAC involves a recall
and a learning process.
14
Recall Process
- Uses Yd(k1) and Y(k) as the address to generate
the control signal from CMAC table, where Yd(k1)
is the desired system output for the next time
step. - CMAC has two inputs and one output.
15
Leaning Process
- U(k) is treated as the desired output to modified
the content stored at location Y(k) and Y(k1),
where Y(k1) is the actual system output for the
next time step k1. - To speed up the initial learning and to achieve
better generalization, the generalization
technique is employed, i.e., each input vector to
CMAC for recall and learning will map to a number
of memory locations instead of only one memory
location.
16
Function Approximation
- How precisely the CMAC can approximate a function
is mainly determined by the quantization in each
dimension of the input vector. - Reducing quantization would quickly increase the
memory demand for storing the CMAC table.
17
Table Update Mechanism
- Gradient-type learning rule
- Wi(k1) Wi(k) ? ? U(k) ? Uc(k) / g
- g the size of generation
- Wi the content of the ith memory location,
there being q locations to be updated - ? the learning rule
- U the correct (desired) data
- Uc the current (actual) data
18
III. A Typical Simulation Study
- Proportional gain P 1.4
- Learning rate ? 0.1
- Generalization 50
- Quantization 5/500(meaning five units divided
into 500 divisions) - Reference command sin(2?k/200) with each
sinusoidal cycle consisting of 400 time steps
Tracking error
Number of cycles
19
A Typical Simulation Study
- In the first five cycles, the system is solely
controlled by the P controller. - The CMAC is added at the 6th cycle, and then the
error reduces quickly and significantly. - The error remains small for some time, and then
it diverges around the 143th cycle.
Control output
Number of time steps
20
Discussion
- The CMAC can significantly reduce the tracking
error. - CMAC can destabilize a control system which is
otherwise stable. The unstable phenomenon
certainly comes from the interactions between the
proportional controller and the CMAC network.
21
Discussion
- The proportional controller can not be removed
even when the magnitude of the proportional
control is very small compared with that of the
CMAC (i.e., when the system output error has been
significantly reduced). Otherwise, the good
tracking can not be maintained.
22
Growth of Oscillation
90th cycle
8th cycle
155th cycle
40th cycle
23
V. Method for Improving
System Stability
- The continued learning of CMAC after the tracking
error has reduced is the major cause of the
instability. - Stopping the CMAC learning has two drawbacks.
First, it can be difficult to determine when to
stop the CMAC learning.Second, if the CMAC stops
learning, then the CMAC control system cannot
respond to any change in the reference command.
24
Modified Learning Rule
- To effectively stop the CMAC learning when the
tracking error is small, but at the same time
allow the system to respond to any change in the
reference command, a deadzone is added to the
CMAC updating rule.Wi(k1) Wi(k) ? ? D U(k)
? Uc(k) / gwhere
25
VI. Experiment
26
Paper Study 2
- Intelligent Controller Using CMACs with
Self-Organized Structure and Its Application for
a Process System - T. Yamamoto, H. Yanagino M. Kaneda
- Proceedings of 1997 IEEE , pp. 76-81
27
Abstract
- This paper describes a design scheme of
intelligent system consists of some CMACs. - Each of CMACs is trained for the specified
command signal. - A new CMAC is generated for unspecificed command
signals, and the CMAC whose command is nearest
for the new command signal, is eliminated. - The proposed intelligent controller can be
designed with relatively small memories.
28
1. Introduction
- The CMACs included in the intelligent controller
are trained in both off-line and on-line learning
process for each of the specified command
signals. - For a unspecified command, a new CMAC is
generated. - The initial weights are set by employing the
linear interpolation to the trained weights
included in two CMACs whose command signals are
nearest for the new command signal. - The CMAC corresponding to the nearest command
signal is eliminated. - The proposed intelligent controller can be
designed with relatively small memories.
29
3. Intelligent Controller Design
controller
30
Outline
- The input signals to each CMAC are the control
error signal and the difference, that is, the
two- dimensional CMACs are equipped in the
intelligent control system. - By including the command signal as one of input
signals in the CMAC, the intelligent control
system can be constructed by using only a
three-dimensional CMAC.
31
Off-line Learning Process
- w(t) command signalu(t) teacher signal
- Updated ruleh 1, 2, , K total number of
the selected weightsg1(t) the gradient to
update the weights
a1, b1, c1 positive cont.
32
On-line Learning Process
- The last weights obtained in the off-line
learning are used as initial ones in the on-line
learning. - Updated rule k the time-delay of the
systemg2(t) the gradient to update the weights
a2, b2, c2 positive cont.
33
Off-line vs On-line
- In the off-line learning process, the teacher
signal u(t) is generated by a certain control
law, e.g., PID control law and human experts. - u(t) is utilized in order to determine the
initial weights in the on-line learning of the
CMAC. - In the on-line learning process, the teaching
signal u(t) can not be obtained. - The desired reference model output ym(t) is
introduced, and the on-line learning is performed
so that the system output y(t) approaches to
ym(t).
34
Self-organized Structure
- A new CMAC is generated for a new command signal
- The initial weights includes in the new CMAC are
set by employing the linear interpolation to the
trained weights included two CMACs which are
nearest for the new command signal - The CMAC whose command signal is nearest for the
new one is eliminated.
35
4. Experimental Results
- Air pressure control system
- Control object regulate the air pressure y to
any desired values by manipulating the control
value angle u. - In order to obtain u(t), PID control law is
employed for this control system.
36
Control Result
Off-line learning(20 iterations)
Conventional PID control
37
Control Result (cont.)
On-line learning(after 5 more iterations)
Unspecified command signal
Recommended
