
Motor Feedback - PowerPoint PPT Presentation
1 / 15
Title:
Motor Feedback
Description:
Position. Encoders. Potentiometers. Resolvers. Velocity. Tachometer ... Potentiometer. Rotary potentiometers provide absolute position as an output voltage ... – PowerPoint PPT presentation
Number of Views:86
Avg rating:3.0/5.0
Title: Motor Feedback
1
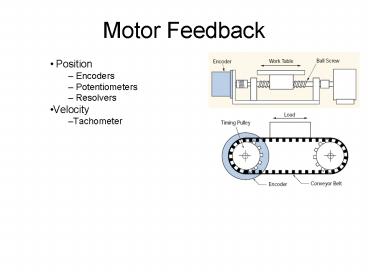
Motor Feedback
- Position
- Encoders
- Potentiometers
- Resolvers
- Velocity
- Tachometer
2
Encoders
- Encoders have a perforated disk that attaches
- to a rotating shaft. LED and photo detector
- pairs produce pulses as perforations pass
- between them.
- There are 2 basic types of encoders
- Incremental
- Absolute
3
HEDL 5540 Incremental Encoder
- Incremental encoders have one row of
- perforations but two photo-diode pairs offset
- by 90 degrees.
- Software or electronics can DECODE these
- Pulses to determine
- Direction
- Incremental change in position
- Often, a single perforation and accompanying
- Photodiode pair provide an index pulse.
4
Quadrature
Quadrature decoding allows counting 4 times
(quad) the number of perforations per revolution.
5
Absolute Encoder
0000 0001 0011 0010 0110 0111 0101 0100 1100 1101
1111 1110 1010 1011 1001 1000
Gray Code provides the absolute position by
reading the outputs as bits. The output bit field
differs from standard binary in that two
successive values differ in only one digit. The
resolution of absolute is usually less than that
of incremental encoders
6
Potentiometer
Rotary potentiometers provide absolute position
as an output voltage
7
Resolvers
Resolvers provide absolute position and are
highly reliable. Signal processing is require to
convert signal to position. Resolution is usually
much less than encoders.
8
Tachometers
- Tachometers are DC motors operated as a
generator. - Voltage produced is proportional to velocity.
- The design is optimized to be as ripple free as
possible, rather than for maximum torque.
9
Quadrature Decoding Lab Assignment
- Connect the MPC565s TPU (Time Processing Unit)
to an optical encoder in order to measure and
display the current position. - Position will be continuously transmitted via the
RS232 port to the PC. - Once Configured, the TPU will count pulses, both
up and down to provide position measurement from
the encoder.
10
TPU3 3X
11
TPU3
- Micro-Engine
- 16 channels of IO
- Timers and Counters
- Task Scheduler
- Inteface
- Host interface
- Configuration
- Channel Control
- Parameter ram
12
Question For next Time
- Like all micro-processors, the micro-engine
requires a clock to operate. Where does the clock
come from and how can we effect its speed? - What does the scheduler do?
- What is DPTRAM, and what role does it play on the
TPU? - What is the role of a host service request?
13
Standard TPU functions
- Each I/O pin can have a different function or
program associated with it. - Scheduler ensures each I/O pins function gets
enough micro-engine time
14
Programming Model
- 3 Groups of Registers
- System Configuration
- Channel control and Status
- Development Support
- Important Register names
- Module Configuration Register (MCR)
- Host Service Request (HSRR)
- Host Sequence Register (HSQR)
- Functions may have various modes of operation
- Channel Function Selection Register (CFSR)
- Channel Priority Registers (CPR)
- Interrupt Control (CICR)
- Channel Link Register (CLR)
15
TPU Initialization
- Initialize TPU modules global registers
- Set Module control Registers (clocks etc)
- TPUMCR (stop, supv, psck etc)
- MCR2(div2,softrst,etbank,fpsck)
- MCR3(TCR2PSC,EPSCKE)
- Set TPU interrupt level using Interrupt
Configuration Register TICR - Disable any channel you want to muck with
- Configure each Channel
- Select channel function CFSR
- Select function mode using HSQR
- Issue Host Service request on each channel HSR
- Enable or Disable individual channel interrupts
CIER - Initialize Channels parameter ram as per
function needs - Enable channel by setting its priority in CPR0-1
- Wait for results
- Initialization is done when HSR bits go to 0b00
- Interrupt status flag
Recommended
CrystalGraphics Presentations





























