
Free, undamped vibrations PowerPoint PPT Presentation
1 / 98
Title: Free, undamped vibrations
1
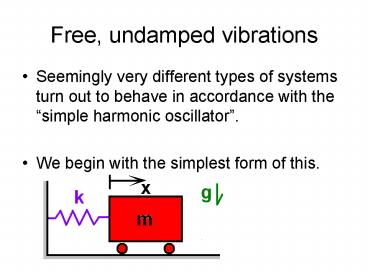
Free, undamped vibrations
- Seemingly very different types of systems turn
out to behave in accordance with the simple
harmonic oscillator. - We begin with the simplest form of this.
2
Some assumptions
- The spring is massless
- The mass is rigid (undeformable)
- The spring is linear, exerting a force
proportional to the amount by which it is
stretched. - The spring is unstretched _at_ x0
3
d2x/dt2 wn2x 0 where wn2 k/m
4
(No Transcript)
5
(No Transcript)
6
Let xxou
7
d2u/dt2 wn2u
0 where wn2 k/m
8
Rao, problem 2.1. An industrial press is
mounted on a rubber pad to isolate it from its
foundation. If the rubber pad is compressed 5mm
by the self-weight of the press, find the natural
frequency of the system.
9
Rao, problem 2.1. An industrial press is
mounted on a rubber pad to isolate it from its
foundation. If the rubber pad is compressed 5mm
by the self-weight of the press, find the natural
frequency of the system.
10
Rao, problem 2.1. An industrial press is
mounted on a rubber pad to isolate it from its
foundation. If the rubber pad is compressed 5mm
by the self-weight of the press, find the natural
frequency of the system.
d2u/dt2 wn2u 0 where wn2 k/m
11
Rao, problem 2.1. An industrial press is
mounted on a rubber pad to isolate it from its
foundation. If the rubber pad is compressed 5mm
by the self-weight of the press, find the natural
frequency of the system.
12
Plastic impact k, m and v1 are givenLet t0
be the instant of impact find the springs
deflection from equilbrium as a function of time.
13
Note that A and f depend upon initial conditions
the period t does not.
14
Our book (Rao) uses a - sign in front of f
15
The constants c and d relate in a less obvious
way to the amplitude and phase.
16
Nonlinear 1DOF problem
- When the system is in the position shown the
spring is neither stretched nor compressed.
17
Draw system at an arbitrary position.
18
Draw system at an arbitrary position.
19
Draw system at an arbitrary position.
20
Draw system at an arbitrary position.
21
Draw system at an arbitrary position.
22
Draw system at an arbitrary position.
23
Draw system at an arbitrary position.
24
Rao, problem 2.1. An industrial press is
mounted on a rubber pad to isolate it from its
foundation. This time the damping of the pad is
taken into account The equivalent k, c, m are
given.
25
Plastic impact, given c0.5, k12.0, m5kg and
v110m/s , all units consistentLet t0 be the
instant of impact find the springs deflection
from equilbrium as a function of time.
26
(No Transcript)
27
Sometimes it is much easier to linearize from
the start rather than derive the full nonlinear
equation and linearize from there.
28
Sometimes it is much easier to linearize from
the start rather than derive the full nonlinear
equation and linearize from there.
29
Sometimes it is much easier to linearize from
the start rather than derive the full nonlinear
equation and linearize from there.
30
(No Transcript)
31
(No Transcript)
32
(No Transcript)
33
(No Transcript)
34
(No Transcript)
35
(No Transcript)
36
(No Transcript)
37
(No Transcript)
38
(No Transcript)
39
Suppose we choose a critically damped case.
40
Suppose we choose a critically damped case.
41
Suppose we choose an underdamped case.
42
One degree-of-freedom response with an active,
periodic force M(t)
43
Suppose M(t) MocosWt
44
As before, well assume small amplitude from the
beginning.
45
As before, well assume small amplitude from the
beginning.
46
As before, well assume small amplitude from the
beginning.
47
As with the unforced case, we seek to put this
equation into a standard form.
48
As with the unforced case, we seek to put this
equation into a standard form.
49
As with the unforced case, we seek to put this
equation into a standard form.
50
As with the unforced case, we seek to put this
equation into a standard form.
51
As with the unforced case, we seek to put this
equation into a standard form.
52
As with the unforced case, we seek to put this
equation into a standard form.
Many different forced systems can be written in
this form.
53
As with the unforced case, we seek to put this
equation into a standard form.
54
Identify the constants of the general form based
upon their place in the equations.
55
Identify the constants of the general form based
upon their place in the equations.
56
Identify the constants of the general form based
upon their place in the equations.
57
As before, for the unforced case
58
As before, for the unforced case
In addition
59
How do we find the general solution to
?
60
Lets begin with the special case of undamped
systems, i.e. z0
61
Divide the general solution q(tc,d) into two
parts qh(tc,d) and qp(t).
62
Let q(tc,d) qh(tc,d) qp(t).Note that c
and d are our constants of integration
evaluated based upon initial conditions.
63
Let qp(t) satisfy
64
Let qh(tc,d) satisfy the above homogeneous
o.d.e. From our experience with the unforced
problem, we know that qh(tc,d) c cos wnt d
sin wnt
65
Let q(tc,d) qh(tc,d) qp(t).Note that the
general solution, qh(tc,d), to the homogeneous
o.d.e. plus a particular solution, qp(t), to the
full, nonhomogeneous o.d.e. equals a general
solution, q(tc,d), to the full, nonhomogeneous
o.d.e.
66
All we need to do, therefore, to find a general
solution to the equation (above) is to find any
particular solution to that equation and add it
to qh(tc,d) c cos wnt d sin wnt
67
Try qp(t) X cos (Wt)
68
qp(t) X cos (Wt)Note that X is not in this
context a constant of integration to be evaluated
based upon initial conditions. Rather, we use it
to attempt to satisfy the full inhomogeneous,
o.d.e. above.
69
(No Transcript)
70
(No Transcript)
71
(No Transcript)
72
(No Transcript)
73
(No Transcript)
74
Total or general solution
q(tc,d) c cos wnt d sin wnt
75
(No Transcript)
76
(No Transcript)
77
(No Transcript)
78
(No Transcript)
79
(No Transcript)
80
(No Transcript)
81
How do we find the general solution to
?
82
How do we find the general solution to
83
How do we find the general solution to
84
(No Transcript)
85
(No Transcript)
86
(No Transcript)
87
(No Transcript)
88
Were looking for values of X and flag that make
this particular solution work.
89
Particular solution for a damped, linear,
single-degree-of-freedom, sinusoidally forced
system.
90
The horizontal motion of z(t) is autonomous.
The spring is unstretched/uncompressed when zx
91
Problem A In terms of the parameters of the
problem, c, k, m, L, W, zo, g, determine the
steady response for q(t). Problem B The
dashpot constant c has been chosen in such a way
as to result in critical damping. Given zero
initial conditions, find the total response for
all tgt0 in terms of k, m, L, W, zo, g, but not
c.
92
Exam 2 Thursday, Nov. 10, 2005, Room 127
Nieuwland, Time 800-915 AM
- As with the first exam, you may bring one sheet
of notes to the exam. - Calculator
- Paper
- Pencils
93
Exam 2 Thursday, Nov. 10, 2005, Room 127
Nieuwland, Time 800-915 AM
- 10/31/05
- 11/02/05 Controls Nightingale
- 11/04/05 Controls Nightingale
- 11/07/05 Controls Nightingale
- 11/09/05 Sen
- 11/10/05 EXAM 2 (including lectures 09/26/05
through 11/07/05) - 11/11/05 No class
94
Exam 2 Thursday, Nov. 10, 2005, Room 127
Nieuwland, Time 800-915 AM
- Five problems
- Similar in format to the first test
- Four of the five will cover vibrations, the fifth
controls - Three of the four vibrations problems will be
very similar to homeworks
95
Vibrations topics
- Free, undamped vibration Equations of motion,
general solution, initial conditions. - Free, damped vibration Equations of motion,
general solution (overdamped, underdamped,
critically damped), logarithmic decrement. - Sinusoidally forced vibration, with and without
damping.
96
Vibrations topics (contd)
- Comparing closed-form solution against a
numerical solution. - Properties of linearity Superposition of forced
responses, scaling. - Nonlinear systems Finding equilibrium points,
including use of Newton iteration linearization
about equilibrium. - Deriving equations of motion with linear
assumptions built in from the start.
97
Project 2 Due date November 16,
2005
Consider the pendulum illustrated below. As
with the first project, the physical apparatus
is located in Fitzpatrick.
98
(20) Make a plot encompassing eleven complete
peaks or local maxima of pendulum movement.
Convert to radians, and plot, q vs. time in
seconds -- as indicated above showing the
individual data points only (i.e. not a
continuous line.) Be careful with the scaling
and representation of this plot. As indicated,
please be sure to include several junctures
along each axis where numerical values of
time/angle are included in the plot. Carefully,
and by hand as indicated above, draw in the
approximate maximum arcs of the first eleven
peaks or local maxima of your periodic motion.
Also as indicated, mark on the time axis the
approximate locations of these eleven local
maxima.
Recommended
