
Real-Time Unit (RTU) - PowerPoint PPT Presentation
1 / 1
Title:
Real-Time Unit (RTU)
Description:
Arbiter. Arbiter. Static processor priority. Dynamic ... Provides the arbiter with processor priorities via priority bus. Arbitration Unit. Functionality ... – PowerPoint PPT presentation
Number of Views:25
Avg rating:3.0/5.0
Title: Real-Time Unit (RTU)
1
Static processor priority
Dynamic processor priority
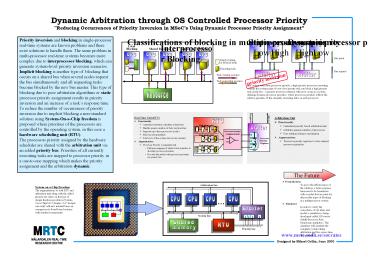
Classifications of blocking in multiprocessor
systems
Priority inversion and blocking in
single-processor real-time systems are known
problems and there exist solutions to handle
them. The same problem in multi-processor
real-time systems becomes more complex due to
interprocessor blocking, which can generate
system-level priority inversion scenarios.
Implicit blocking is another type of blocking
that occurs on a shared bus when several nodes
request the bus simultaneously and all
requesting tasks become blocked by the new bus
master. This type of blocking due to poor
arbitration algorithms or static processor
priority assignment results in priority inversion
and an increase of a tasks response time. To
reduce the number of occurrences of priority
inversion due to implicit blocking a non-standard
solution using System-On-a-Chip freedom is
proposed where priorities of the processors are
controlled by the operating system, in this case
a hardware scheduling unit (RTU).
The processors priority
assigned by the hardware scheduler are shared
with the arbitration unit via an added priority
bus. Priorities of all currently executing tasks
are mapped to processor priority in a one-to-one
mapping which makes the priority assignment and
the arbitration dynamic.
Interprocessor Blocking
CPU
CPU
CPU
CPU
Local
Low
High
Low
High
Blocking
Shared Resource
Implicit Bus-Blocking
H
L
H
L
CPU
CPU
CPU
CPU
CPU
Bus grant
Ready,waiting,
or blocked tasks
Executing task
Bus request
Arbiter
Arbiter
Task owning resource
priority inversion
Task requesting resource
In a system with static processor priority, a
high priority processor executing a (from the
system point of view) low priority task can block
a high priority task on the bus. A priority
inversion situation will never occur in a system
utilising dynamic processor priorities, where
processor priorities reflects the relative
priorities of the currently executing tasks on
each processor.
Resource
- Real-Time Unit (RTU)
- Functionality
- Centralised real-time scheduler in hardware
- Handles generic number of tasks and priorities
- Supports up to three processors (today)
- Microsecond granularity
- Total view of the system state (at any instant)
- Augmentations
- Processor Priority Assignment unit
- Performs mapping of relative task priorities to
absolute processor priorities - Provides the arbiter with processor priorities
via priority bus
- Arbitration Unit
- Functionality
- Centralised priority based arbitration unit
- Arbitrates generic number of processors
- Uses arbitrary fairness mechanism
- Augmentations
- Processor priority registers to store current
processor priorities
Requests
Grants
RTU
Task queue cpu1
Arbiter
0
7
1
3
Processor Priority
1
Assignment unit
Task queue cpu2
2
6
9
Processor Priority Registers
3
Task queue cpu3
2
1
4
5
6
The Future
- Formalisation
- To prove the effectiveness of the solution, a
tasks response time need to be formalised with a
model that accounts for all possible types of
blocking in a multiprocessor system. - Simulator
- In order to verify the correctness of our ideas
and model, a simulator is being developed called
MP-rmsim (Multi-Processor Rate Monotonic
simulator). The simulator will simulate the
complete system taking arbitration and bus access
time into account.
Arbitration bus
System-on-a-Chip Freedom The augmentations to
both RTU and arbitration unit along with the
added priority bus relies on the type of design
freedom possible in System-On-a-Chip(SoC)
designs. SoC designs can easily add new internal
buses in comparison to board based systems with
standard components.
...
CPU
CPU
CPU
CPU
Arbiter
System bus
Shared
RTU
memory
Priority bus
www.mrtc.mdh.se/socrates
Recommended
CrystalGraphics Presentations





























