
Root Locus PowerPoint PPT Presentation
Title: Root Locus
1
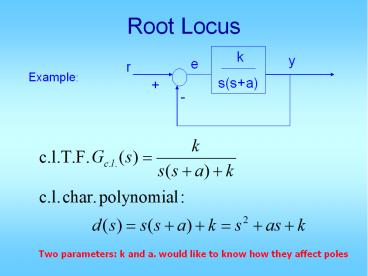
Root Locus
k s(sa)
y
e
r
Example
-
Two parameters k and a. would like to know how
they affect poles
2
(No Transcript)
3
(No Transcript)
4
(No Transcript)
5
(No Transcript)
6
(No Transcript)
7
The root locus technique
- Obtain closed-loop TF and char eq d(s) 0
- Re-arrange terms in d(s) by collecting those
proportional to parameter of interest, and those
not then divide eq by terms not proportional to
para. to get - this is called the root locus equation
- Roots of n1(s) are called open-loop zeros, mark
them with o in s-plane - Roots of d1(s) are called open-loop poles, mark
them with x in s-plane
8
- The o and x marks divide the real axis into
several segments. - If a segment has an odd total number of marks to
its right, it is part of the root locus. High
light it. - If a segment has an even total number of marks,
then its not part of root locus. - For the high lighted segments, mark out going
arrows near a pole (x), and incoming arrows
near a zero (o).
9
- Asymptotesasymptotes order - finite zeros
poles - finite zeros - n - m
- Meeting place on the real axis at
10
- Imaginary axis crossing point
- From d(s) 0
- Form Routh Table
- Set one row 0
- Solve for K
- Use the row above to aux eq A(s)0
- Solution gives imag. axis crossing point -jw
- System oscillates at frequency w when K is equal
to the value above
11
- When two branches meet and split, you have
breakaway points. They are double roots. d(s)0
and d(s) 0 also. Use this to solve for s and k.
12
- Departure angle at a complex pole
- Arrival angle at a complex zero
- Read the book and learn the derivation
- Will show example
- Matlab can construct root locus for you
- Let num n1(s)s coeff vector
- Let den d1(s)s coeff vector
- rlocus(num,den) draws locus for the root locus
equation - But you need to first get to Kn1(s)/d1(s) 1 0
- Should be able to do first 7 steps
13
K
- e.g.
- c.l. T.F.
- o.l. zero no finite zeros 3 infinite
zeroso.l. poles s 0, -2, -6 - Mark real axis
-
14
- Asymptotes n m 3 0 3angles -180º,
60º, -60º
15
No complex pole/zero, no need to worry about
departure/arrival angles
16
(No Transcript)
17
- Char. poly.
- num s3 , zeros -3
- den s(s5)(s22s2)(s6) ,
- poles0, -5,-6,-1j1
- Asymptotes n m 4
- angles 45º, 135º
18
(No Transcript)
19
Two branches coming out of -5 and -6 are heading
to each other, and will and break away. Without
actually calculating, we know the breakaway point
is somewhere between -5 and -6. Since there are
more dominant poles (poles that are closer to the
jw axis), we dont need to be bothered with
computing the actual numbers for the break away
point. Departure angle at p -1j is
angle(-1j3)-angle(-1j0)-angle(-1j5)-angle(-1
j4)pi/2 ans -0.8885 rad -50.9061 deg
20
rlocus(1 3, conv(1 2 2 0,1 11 30))
Hand sketch is close but departure angle is
wrong! Also notice how I used conv.
21
- Example motor control
- The closed-loop T.F. from ?r to ? is
22
- What is the open-loop T.F.?
- The o.l. T.F. of the system is
- But for root locus, it depends on which parameter
we are varying. - If KP varies, KD fixed, from char. poly.
23
- The o.l. T.F. for KP-root-locus is the system
o.l. T.F. - In general, this is the case whenever the
parameter is in the forward loop. - If KD is para, KP is fixedFrom
24
- More examples
- No finite zeros, o.l. poles 0,-1,-2
- Real axis are on R.L.
- Asymp 3
25
- -axis crossing
- char. poly
26
- Example
- Real axis
- (-2,0) seg. is on R.L.
27
- For
28
- Break away point
29
- -axis crossing
- char. poly
30
- Example in prev. ex., change s2 to s3
31
(No Transcript)
32
- -axis crossing
- char. poly
Recommended
