
Nessun titolo diapositiva - PowerPoint PPT Presentation
1 / 1
Title:
Nessun titolo diapositiva
Description:
A Real-time Control System Prototype for Mechanical and Optical Systems based on Parallel Computing Techniques Motivation The automatic control systems of optical and ... – PowerPoint PPT presentation
Number of Views:37
Avg rating:3.0/5.0
Title: Nessun titolo diapositiva
1
A Real-time Control System Prototype for
Mechanical and Optical Systems based on Parallel
Computing Techniques
Motivation The automatic control systems of
optical and mechanical systems requires both the
perfect and continuous synchronisation of all the
systems. This synchronization is generally
obtained using specialised hardware (e.g. VME
boards, etc.) and software, including real-time
operating systems (i.e. LynxOS). These components
are generally very expensive if large computing
powers are required for the global control of
optical and mechanical systems, like adaptive
optics systems, mechanical suspensions for
gravitational wave detection, optical
inteferometers. Moreover, the management and
upgrade of these systems is not an easy task.
On the other hand, many techniques are now
available for increasing the global available
off-line computing power, based on standard units
(PCs), standard network (Ethernet) and standard
operating systems (Linux) and software. This
large standardisation and development of special
software packages makes it relatively easy to
organise these units in clusters (using software
tools like OpenMosix, MPI, GRID middleware, etc.)
in order to increase the global computing power.
As a consequence the cost/GFlop unit is very low
in comparison with real-time systems. Therefore,
taking into account that the network speed has
been largely increased in these last years, we
started to explore the possibility of application
of off-line standard parallel computing
architectures for the implementation of real-time
control systems when a large real-time control
computing power is required coupled with a
limited control band. For this task, we used
a control system prototype developed in Napoli
for the low frequency control of a suspended
optical interferometer and integrated it with the
Napoli Computer Farm implemented for the
development of off-line parallel data analysis of
gravitational waves from coalescing binaries.
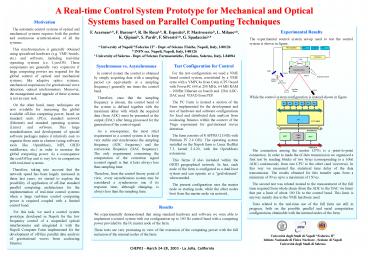
Experimental Results The experimental control
system set-up used to test the control system is
shown in figure, While the control system
configuration is instead shown in figure
The connection among the master CPUs is a
point-to-point connection. In order to made the
of data transmission we organized a first test by
sending blocks of two bytes (corresponding to a
16bit ADC) continuously from one CPU to the other
(and viceversa). In this way we measured the
statistical time delay of the data transmission.
The results obtained for this transfer span from
a minimum of 90 us up to a maximum of 150 us.
The second test was related instead to the
measurement of the full time required from whole
chain (from the ADC to the DAC via farm) that put
a limit of about 100 Hz to the control band. This
limit is anyway mainly due to the VME hardware
used. Tests related to the real-time use of
the full farm are still in progress, both on the
possible parallel and serial computation
configurations obtainable with the internal nodes
of the farm.
F. Acernesea,b, F. Baronec,b, R. De Rosaa,b, R.
Espositob, P. Mastroserio,b, L. Milanoa,b, K.
Qipianib, S. Pardia, F. Silvestria,b, G.
Spadaccinia,b a University of Napoli Federico
II - Dept. of Scienze Fisiche, Napoli, Italy,
I-80126 b INFN sez. Napoli, Napoli, Italy,
I-80126 c University of Salerno - Dept. of
Scienze Farmaceutiche, Fisciano, Salerno, Italy,
I-84084
Test Configuration for Control For the test
configuration we used a VME based control system,
constituted by a VME crate with a VMPC4a from
Cetia (CPU board with PowerPC 604 at 200 MHz, 64
MB RAM 10Mbit Ethernet on board) and 12bit
ADC-DAC mod. VDAD from PEP. The PC Farm is
instead a section of the Farm implemented for the
development and test of hardware and software
configurations for local and distributed data
analysis from coalescing binaries within the
context of the Virgo experiment for gravitational
waves detection. The farm consists of 8 APPRO
2114Xi with Pentium IV 2.4 GHz. The operating
system installed on the Napoli farm is Linux
RedHat 7.3, kernel 2.4.20, with the OpenMosix
extensions. This farms if also included within
the GRID geographical network. In fact, each node
of the farm is configured as a dual-boot system
and can operate as a grid-element when needed.
The present configuration uses the master node
as starting node, while the other nodes boot from
the master node via network.
Synchronous vs. Asynchronous In control system
the control is obtained by simply acquiring data
with a sampling period (or equivalently at a
sampling frequency) generally ten times the
control band. Therefore, once that the
sampling frequency is chosen, the control band of
the system is defined together with the maximum
delay with which the acquired data (from ADC)
must be presented at the output (DAC) after being
processed for the generation of the control
signal. As a consequence, the most strict
requirement in a control system is to keep very
stable and synchronous the sampling frequency
(ADC frequency) and the conversion frequency (DAC
frequency). The only requirement concerning the
computation of the correction signal (control
signal) is that it lasts always less than
sampling time. Therefore, from the control theory
point of view, every asynchronous system may be
considered a synchronous one if its response
time, although changing, is always less than the
sampling time.
Results We experimentally demonstrated that using
standard hardware and software we were able to
implement a control system with our configuration
up to 100 Hz control band with a computing power
provided by the Pc master node of the farm. These
tests are very promising in view of the extension
of the computing power with the full inclusion of
the internal nodes of the farm.
CHEP03 - March 24-28, 2003 - La Jolla,
California
Recommended
CrystalGraphics Presentations





























