
Presentaci PowerPoint PPT Presentation
1 / 41
Title: Presentaci
1
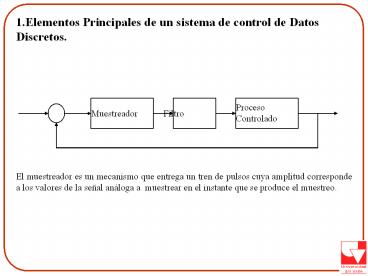
- Elementos Principales de un sistema de control de
Datos Discretos. - El muestreador es un mecanismo que entrega un
tren de pulsos cuya amplitud corresponde a los
valores de la señal análoga a muestrear en el
instante que se produce el muestreo.
2
e(t)
e(t)
t
t
0
0
Señal de entrada continua al muestreador
Salida discreta del muestreador
3
Ejemplo de Sistema de Control Digital
Comando Altitud
Proceso Controlado
Control Digital
Prefiltro
A/D
DA
-
-
Giroscopio
Transduct. Posición
Control automático para un eje para el pilotaje
automático de un avión.
4
Comando Altitud
Proceso Controlado
Control Digital
Prefiltro
A/D
DA
-
Retenedor
Giroscopio
TX Posición
Retenedor
Sistema con muestreo múltiple Los muestreadores
adquieren muestras de la señal con frecuencia
constante, se cumple un periodo de muestreo. Los
retenedores mantienen el valor de la señal
retenida hasta que llega un nuevo valor
correspondiente a una nueva muestra.
5
La Bucla Típica de Control Realimentada
Computador Digital
Planta Proceso
DA
Actuador
-
Reloj
Sensor
A / D
6
Funciones de un Computador de Proceso
- Tratamiento (Data Login)
- Recoger la máxima información sobre el
funcionamiento del proceso. - Medición de variables y parámetros.
- Pretratamiento - Normalizar
- - Convertir unidades
- - Linealizar parámetros
- Procesamiento - Cálculos
- - Análisis estadística
- - Almacenamiento en dispositivos
- - Presentación en plantilla o impresora
7
- Supervisión - Alarmas verificar el correcto
funcionamiento del proceso - aviso de
falla. - - Asistencia facilitar las operaciones
normales del operador. - - Indicación de acciones a ejecutar.
- Presentación entrega información importante para
la toma de decisiones en la operación de mando y
control. - CUANTIZACIÓN En el proceso de conversión A / D o
el proceso de representar una señal en un número
finito de estados discretos, la precisión depende
del de bits de la palabra de cuantización.
8
Cuantización en tiempo
Cuantización en amplitud
Codificación
Muestra
Se define un nivel de cuantización Q que
corresponde a la distancia entre dos niveles
adyacentes de decisión. n de bits de la
palabra de cuantización. El error de redondeo
es X señal análoga. Xq señal digital
9
(No Transcript)
10
Selección del Periodo de Muestreo.
- El teorema del muestreo especifica que una señal
de tiempo continua con componentes de frecuencia
hasta WC rad/seg, teóricamente puede ser
reconstruida sin distorsión si se muestrea a una
velocidad mayor de 2WC rad/seg. - En procesos con constantes de tiempo mayores se
podrá utilizar un tiempo de muestreo más grande. - Debe tenerse en cuenta
- El equipo de medida se recomienda diseñarlos
con una Wcorte ancho de banda de red cerrada. - El rechazo a las perturbaciones Se recomiendan
frecuencias de muestreo entre 5 y 20 veces el
ancho de banda de la respuesta al ruido en red
abierta. En la medida en que se exijan tiempo de
muestreo más altos, se requiere de conversores y
microprocesadores más rápidos.
11
- La calidad del control Generalmente disminuye
con periodos de muestreos largos. - Muestrear entre 8 y 10 veces durante el ciclo de
oscilación amortiguada en la señal, si el sistema
es sub-amortiguado. - Muestrear de 8 a 10 veces la frecuencia del
ancho de banda de red cerrada, el límite inferior
teórico es 2. - Muestrear de 8 a 10 veces durante el tiempo de
subida si es sobreamortiguado.
12
Tipos de Señales
Señal de Tiempo Continuo
(b)
(a)
Es una señal que tiene valores para todo instante
de tiempo.
Señal Análoga Es una señal de tiempo continuo
con un rango continuo de valores.
13
Señal de Tiempo Discreto Es una señal definida
solamente en instantes del tiempo generalmente
iguales.
Señal de datos muestreados
Señal Digital
Si la amplitud asume un rango continuo de valores
se denomina señal de datos muestreado. Si los
posibles valores están registrados a un conjunto
de valores se denomina señal digital.
14
Muestreo y Cuantificación
- Existen varios tipos de muestreo
- Muestreo Periódico es el más usual, los
instantes de muestreo están igualmente espaciados
cada T segundos, sea - T KT, T es el periodo de muestreo, con K
0,1,2,3, - Muestreo de Orden Múltiple El patrón de tKs se
repite periódicamente tK r- tK constante,
para todo tK. - Muestreo Múltiple Sistemas de múltiples lazos
que debido a la dinámica de cada lazo requieren
diferentes periodos de muestreo. - Muestreo Aleatorio La variable tK es una
variable aleatoria.
15
Tipos de Sistemas
- De acuerdo al tipo de señal
- Sistema Análogo
- Si sólo existen en él señales análogas se
describen mediante ecuaciones diferenciales. - Sistema de Tiempo Discreto
- Si sólo existen en él señales discretas, se
describen mediante Ecuaciones de diferencias. - Sistema de Datos Muestreados
- Tienen señales discretas (pulsos de amplitud
modulada) y señales de tiempo continuo - Sistema Digital
- Si incluye señales de tiempo continuo y señales
digitales en forma de código numérico.
16
- Sistemas Discretos
- Es el que procesa secuencia, es decir recibe una
secuencia y entrega otra, la cual corresponde a
una frecuencia preestablecida de la secuencia de
entrada. - Secuencia de salida f (secuencia de entrada)
- En bloque funcional
- Los sistemas discretos se clasifican en
- Estática
- Dinámicos
- Causales
- No causales
SISTEMA DISCRETO
17
- Sistema discreto estático
- La salida en un instante de muestreo depende de
la entrada en ese instante de muestreo - Sistema Discreto Dinámico
- La salida puede ser función de la entrada y la
salida de índices de diferente orden al actuar
Sistema Discreto Estática
Sistema Discreto Dinámico
18
- Sistema Discreto Dinámico Causal
- El elemento de salida puede estar influenciada
por las salidas anteriores y por las entradas
hasta el instante de muestreo en que se produce
la salida. - Sistema no causal
- Este sistema puede generar elementos de índice
superior al elemento de entrada, realizar una
función a través de un algoritmo considerando los
elementos generados y entregar una secuencia de
salida
Sistema Discreto Dinámico Casual
Sistema Discreto Dinámico no casual
19
- Secuencias
- Definición Un conjunto numerado de elementos en
donde se hace corresponder a cada número entero
el valor de modelos elementos del conjunto de
valores de la señal de tiempo discreto. - Una secuencia se representa como Xk, donde K es
el entero asociado a cada elemento e indica el
orden de ubicación relativa de ese elemento
dentro de la secuencia, K puede ser positiva o
negativa. - Se escoge el índice 0 para indicar el elemento
que se encuentra ubicado en el origen de
referencia y que define la frontera entre los
valores positivos y negativos del índice K. - Ejemplo
20
- De igual forma también se puede expresar
colocando los elementos en el orden en que se
encuentran en la secuencia. - Puede también especificarse
21
- Secuencia impulso unitario
- Secuencia escalón unitario
22
- Secuencia exponencial
23
(No Transcript)
24
- Secuencia Sinosoidad
25
- Muestreo de Señales Continuas
- El muestreador es un dispositivo lineal, cumple
con el principio de superposición
26
- Durante el instante del muestreo el muestreador
toma la señal continua y toma la forma
de la Fig. (a) para el desarrollo matemático el
muestreador actúa en un - , el área bajo el impulso es igual
al valor o magnitud de la señal continua en el
instante del muestreo, el impulso
en el punto del muestreo es dado por - Donde es el impulso muestrario.
- Un muestreador con salida como la ecuación es
como muestreador impulso ideal. - La secuencia de impulsos a la salida del
muestreador es
27
- Nota Tomando TL a ambos lados de la ecuación
28
Reconstrucción de señales continuas a partir de
señales discretas
- Considere la señal de control producida
intermitentemente cada T segundos por un
computador expresado por una serie de impulsos
29
Retenedor de orden cero Ideal
Retenedor de primer orden
30
- Una simple manera de convertir una señal discreta
en una señal continua es sostener la señal
discreta en el valor constante ___________ hasta
que el siguiente valor llegue. Entonces si
es el resultado de la señal continua,
para
y
En particular,
para
para
para
La ecuación anterior corresponde al retenedor de
orden cero
31
- Considerando dos valores discretos sucesivos,
y
se asume que el siguiente periodo
, la señal continua puede ser dada por una
extrapolación lineal de los dos valores previos
para
y
La ecuación anterior corresponde al retenedor de
primer orden. El retenedor de primer orden
requiere al menos de dos valores para hacerlo.
Construcción de la señal continua, en tanto que
el de orden cero requiere de un solo valor. Nota
1. El fundamento matemático del retenedor
independiente del orden es
32
Considere una señal continua , el cual
debe ser constante de valores discretos
La serie de Taylor alrededor del valor muestreado
es dado por
Si consideramos solo el término de orden cero,
entonces el retenedor de orden cero es
,
Si consideramos el término constante y el de
primer orden
33
La derivada de
, puede ser aproximada por
Entonces el elemento retenedor de primer orden
2. La salida del elemento retenedor de orden cero
es un pulso con una altura constante igual a
y una duración
La transformación de Laplace del retenedor es
34
La F. de T. del retenedor de orden cero es
3. De igual forma la F. de T. del retenedor de
primer orden es
35
Conversión de modelos continuos o modelos
discretos
Ref.
D/A Convert.
retenedor
proceso
Control Digital
-
A/D Convert.
36
Caso modelo discreto del retenedor digital PID
Sea el valor muestreado en el
instante de muestreo, al compararlo con
el valor del resulta en
, la acción
central proporcional es La acción de control
integral es basado en la integración del ERROR
sobre un periodo de tiempo como los valores del
ERROR son variables en modo discreto, entonces
la Puede ser aproximado por integración numérica
(usando integración rectángular)
Área
37
Entonces la acción de control en modo integral
está dado por
Para el modo derivativo necesitamos una
evaluación numérica de la derivada
38
La aproximación de primer orden para la derivada
es
Entonces la acción de control en el modo derivado
es
La acción de control para el PID digital es
modulada
La ecuación anterior es conocida como ecuación de
diferencias
Ejemplo modelo en tiempo discreto de un proceso
de primer orden.
39
Dado un proceso no lineal de primer orden
Aproximando la derivada por diferencia de primer
orden
entonces en un instante de tiempo dado
Para un sistema lineal de primer orden
40
Usando la aproximación de la derivada, entonces
resulta en
Ejemplo modelo discreto para un proceso de
segundo orden Dado el sistema lineal
La aproximación de la derivada de primer orden
41
Para la segunda derivada
Entonces al reemplazar en la ecuación del modelo
Recommended
